Verfasste Forenbeiträge
-
AutorBeiträge
-
 EagleEiAdministrator
EagleEiAdministratorUnd hier beides zusammen.
Ich habe hierzu eine kleine 1mm gfk Plattr als Träger dazwischen gemacht.Attachments:
You must be logged in to view attached files.EagleEiAdministratorHier siehst du das Pilzband und mein Gimbal.
Attachments:
You must be logged in to view attached files.EagleEiAdministratorGuten Morgen,
in der Mitte des Copters wäre optimal, beim Globeflyer hängt es jedoch eher vorn und wir nutzen dazu eine Adapterplatte die mit Pilzband befestigt wird.Alternativ kannst du auch mit Abstandsbolzen dein Gimbal dran schrauben. Das neue RunCam Gimbal hat hierfür in der Dämpferplatte passende befestigungslöcher drin.
Gruß
EagleEiAdministratorEs scheint als wäre dein Controller besonders Empfindlich, ich bewundere dein Durchhaltevermögen!
Wie der Schleifring intern aufgebaut ist weiß ich nicht, und ich habe nie darauf geachtet an welchem Draht was dran kommt.
Wie auf deinem Bild zu sehen ist sind deine Kabel gut verdrillt, das sollte so auch passen.
Schau mal hier, evtl. helfen dir diese Bilder.Ebenso habe ich dir mal meine aktuellen Einstellung hier angefügt
Attachments:
You must be logged in to view attached files.EagleEiAdministratorHi Fred,
don´t worry, it is just a 12 wire Slipring! 😉I always do soldering the slipring without thinking about the wires, only at the end, before soldering on the Storm32 Controller I use my Multimeter to find out wich cabel goes to IMU, AV-OUT or Motor.
It´s easy! First do wiring like that:
Here the wires for the Slipring:
1 Mot1
2 Mot1
3 Mot1
4 Mot2
5 Mot2
6 Mot2
7 SCL
8 SDA
9 VCC
10 GND
11 AV-Out
12 AV-Out-GNDThan just measure on the coming wires out of the Slipring and try to find the Sensor kables you can measure between the Sensor Vcc, GND, SDA, SCL and you schould find the wires on the other side.
Than the same for AV-Out!
and than mesure between the rest of wires, you should find an impedance around 15 Ohms betwen 3 wires, this must be MotorA and the others must be Motor B.
Motor A and Motor B can be Pich or Roll and in case you have not the Pich on MOT1 you can change it in your GUI too!OK?
EagleEiAdministratorIch habe hier ein paar ergänzende Tipps zum Aufbau beschrieben!
EagleEiAdministratorOk, somit ist klar dass die Errors über die Motoren, vorallem über den Pitch auftreten.
Regel mal die Leistung der Motoren stark runter, ca. 60 sollte zunächst ausreichen und vermutlich weniger Errors erzeugen.
Wenn dem so ist, dann muss du Verkabelung optimiert werden und die Ferrite in SDA und SCL eingebaut werdenEagleEiAdministratorSobald du das Gimbal tool startest werden am Punkt der Motoren die Motoren alle aktiviert und es kommt zu dem Fehler.
Wir sollten jedoch an dieser stelle auf das Gimbaltool verzichten und an dieser stelle manuell vorgehen.
Also:
1. Alle Motoren Disable stellen und störe!
2. Akku dran stecken, wenn kein Fehler dann 1. Motor aktivieren usw.
Wenn ein IMU Error schon auftritt, auch ohne dass ein Motor aktiv war ist was faul!Bin gespannt…..
EagleEiAdministratorOk, spannend! Dann stell mal in der GUI die alle drei Motoren auf disable und Speicher mit „write&store“ dann verbinde dein Akku erneut und es sollten keine IMU ERRORS auftreten. Als nächstes mal den Motor1 an, wenn keine Errors auftreten dan den MOT2 und so weiter. Ab wann treten dann die IMU Fehler auf?
Sende mal ein Bild von deinen Motor PIDs
Am besten wir Wechsel an dieser Stelle in unser Stuhlkreis STORM Einstellungen, damit es hier zur Verkabelung nicht verwirrt.EagleEiAdministratorAn deiner Stelle würde ich den Fehler versuchen ein zu klammern, zunächst Die Kamera IMU mal ohne schleifringvam storm anschließen, wenn weitere Fehler auftreten liegt der Fehler am Controller.
Wenn erst der Schleifring den Fehler Verursacht, die Motoren erst einzeln aktivieren, evtl. Sind die Powerwerte zu hoch, dadurch die Fehler.
Sinnvoll wäre auch die Drähte vom Schleifring direkt an den Controller zu löten, wie hier:
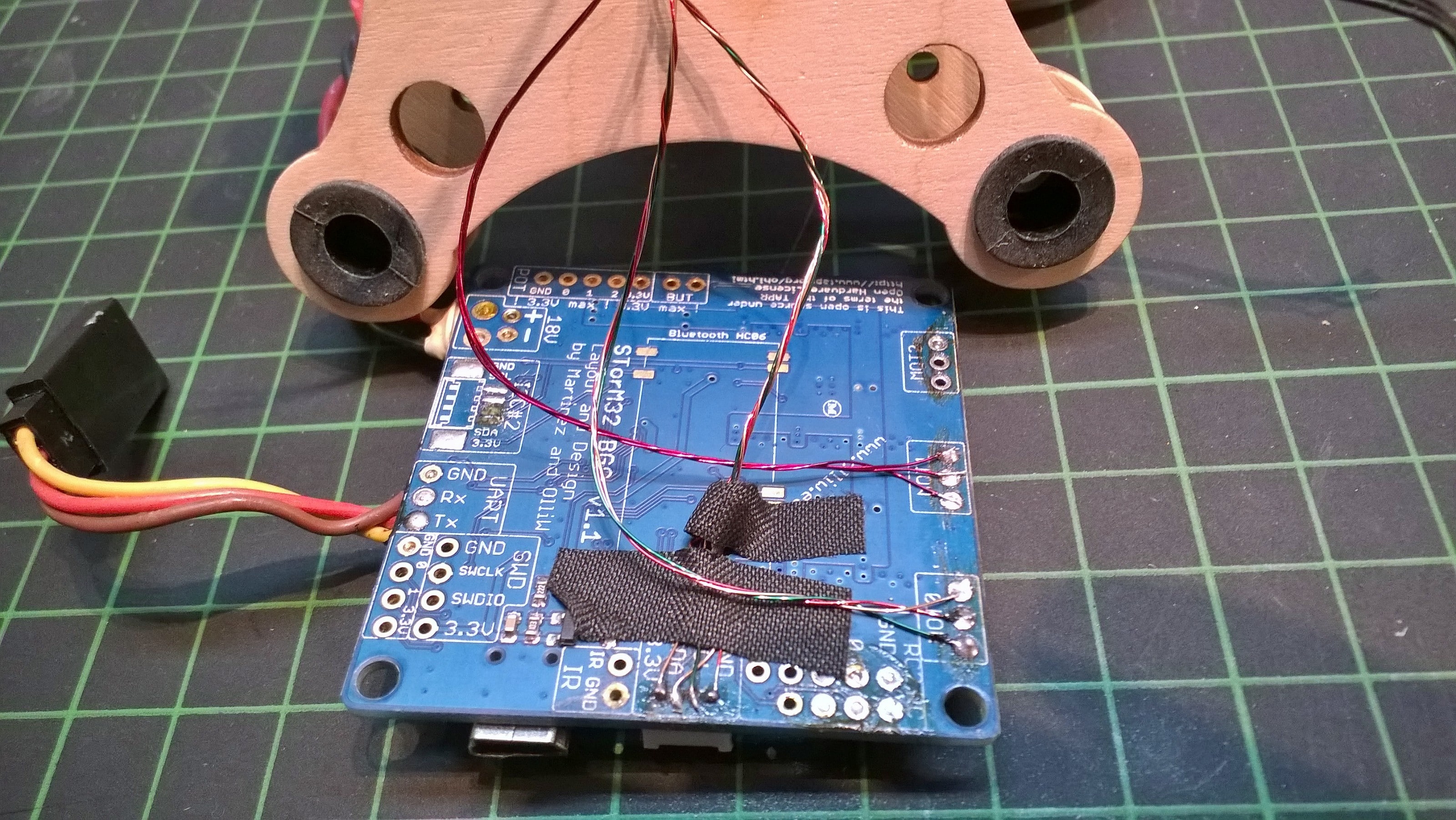
Hast du die Kupferdrähte des Schleifrings gekürzt? Siehe:Attachments:
You must be logged in to view attached files.EagleEiAdministratorDu hast recht, auf deinem Bild scheint als wäre dies ausser der Mitte. Seltsam, bei meinen Aufbauten ist das nicht aufgefallen. Ich werde mir das nochmal genau anschauen und gegebenenfalls für Zukünftige Versionen anpassen.
EagleEiAdministratorHier noch ein Bild mit der NT-IMU (ein CC3D Atom) passt auch in die Schwinge und I2C Errors werden nie wieder ein Thema sein müssen.
Zusätzlich noch ein paar Bilder der vereinfachten Verkabelung am RunCam2 (lässt sich auch am Xiaomi und Mobius) durchführen)
Attachments:
You must be logged in to view attached files.EagleEiAdministratorDen Ferrittkern immer direkt nach dem Board rein. Am besten nur den SDA und SCL duch den Kern führen.
WICHTIG: die Drähte sollten kurz sein und immer Seterise etwas verdrillt, so werden die Störungen durch die Motorleitungen am wenigsten Probleme verursachen. Also Mot1 alle drei verdrillen, Mot2 ebenso und SDA, SCL, VCC und GND zusammen. Dann sollten diese einzelnen Bündel möglichst nicht Parallel zu einander liegen, idealerweise voneinander entfernt.
Den Gimbal noch mit 7,2V betreiben.Auf diese Weise kannst du die I2C Errors umgehen, schade dass I2C so empfindlich ist und diese Maßnahmen notwendig sind.
Ich persönlich setze inzwischen nur noch NT-IMU ein, was das Gimbal dann auch wieder mit 12V betreiben lässt.Attachments:
You must be logged in to view attached files.EagleEiAdministratorDie I2c errors lassen sich vermeiden!
Hast du dein Gimbal auch auf 7,2V aufgebaut? Wenn du alternativ mit 3S betreiben möchtest, musst du auf NT-IMU setzen.
Bilder vom Aufbau helfen um zu sehen wo evtl ein Fehler sein könnte!
-
AutorBeiträge