Open DIY Projects › Stuhlkreis › EagleEi Gimbal 360° › Verkabelung für das EagleEi 360° Gimbal
- Dieses Thema hat 38 Antworten sowie 8 Teilnehmer und wurde zuletzt vor 10 Jahren, 2 Monaten von
 EagleEi aktualisiert.
EagleEi aktualisiert.
-
AutorBeiträge
-
2. Mai 2016 um 7:11 Uhr #2789EagleEiAdministrator
Den Ferrittkern immer direkt nach dem Board rein. Am besten nur den SDA und SCL duch den Kern führen.
WICHTIG: die Drähte sollten kurz sein und immer Seterise etwas verdrillt, so werden die Störungen durch die Motorleitungen am wenigsten Probleme verursachen. Also Mot1 alle drei verdrillen, Mot2 ebenso und SDA, SCL, VCC und GND zusammen. Dann sollten diese einzelnen Bündel möglichst nicht Parallel zu einander liegen, idealerweise voneinander entfernt.
Den Gimbal noch mit 7,2V betreiben.Auf diese Weise kannst du die I2C Errors umgehen, schade dass I2C so empfindlich ist und diese Maßnahmen notwendig sind.
Ich persönlich setze inzwischen nur noch NT-IMU ein, was das Gimbal dann auch wieder mit 12V betreiben lässt.Attachments:
You must be logged in to view attached files.2. Mai 2016 um 7:16 Uhr #2791EagleEiAdministratorHier noch ein Bild mit der NT-IMU (ein CC3D Atom) passt auch in die Schwinge und I2C Errors werden nie wieder ein Thema sein müssen.
Zusätzlich noch ein paar Bilder der vereinfachten Verkabelung am RunCam2 (lässt sich auch am Xiaomi und Mobius) durchführen)
Attachments:
You must be logged in to view attached files.2. Mai 2016 um 18:48 Uhr #2798Ch3fk0ch
TeilnehmerWenn ich dsa nicht hinbekomme, dann kauf ich mir auch das CC3D Atom teil^^
3. Mai 2016 um 20:59 Uhr #2805TeilnehmerAlso, ein 2S Lipo hat auch nichts gebracht.
Im Anhang mal Fotos.
Wenn ihr auch keine Idee mehr habt denn werde ich wohl den Atom testen.Attachments:
You must be logged in to view attached files.3. Mai 2016 um 22:42 Uhr #2811EagleEiAdministratorAn deiner Stelle würde ich den Fehler versuchen ein zu klammern, zunächst Die Kamera IMU mal ohne schleifringvam storm anschließen, wenn weitere Fehler auftreten liegt der Fehler am Controller.
Wenn erst der Schleifring den Fehler Verursacht, die Motoren erst einzeln aktivieren, evtl. Sind die Powerwerte zu hoch, dadurch die Fehler.
Sinnvoll wäre auch die Drähte vom Schleifring direkt an den Controller zu löten, wie hier:
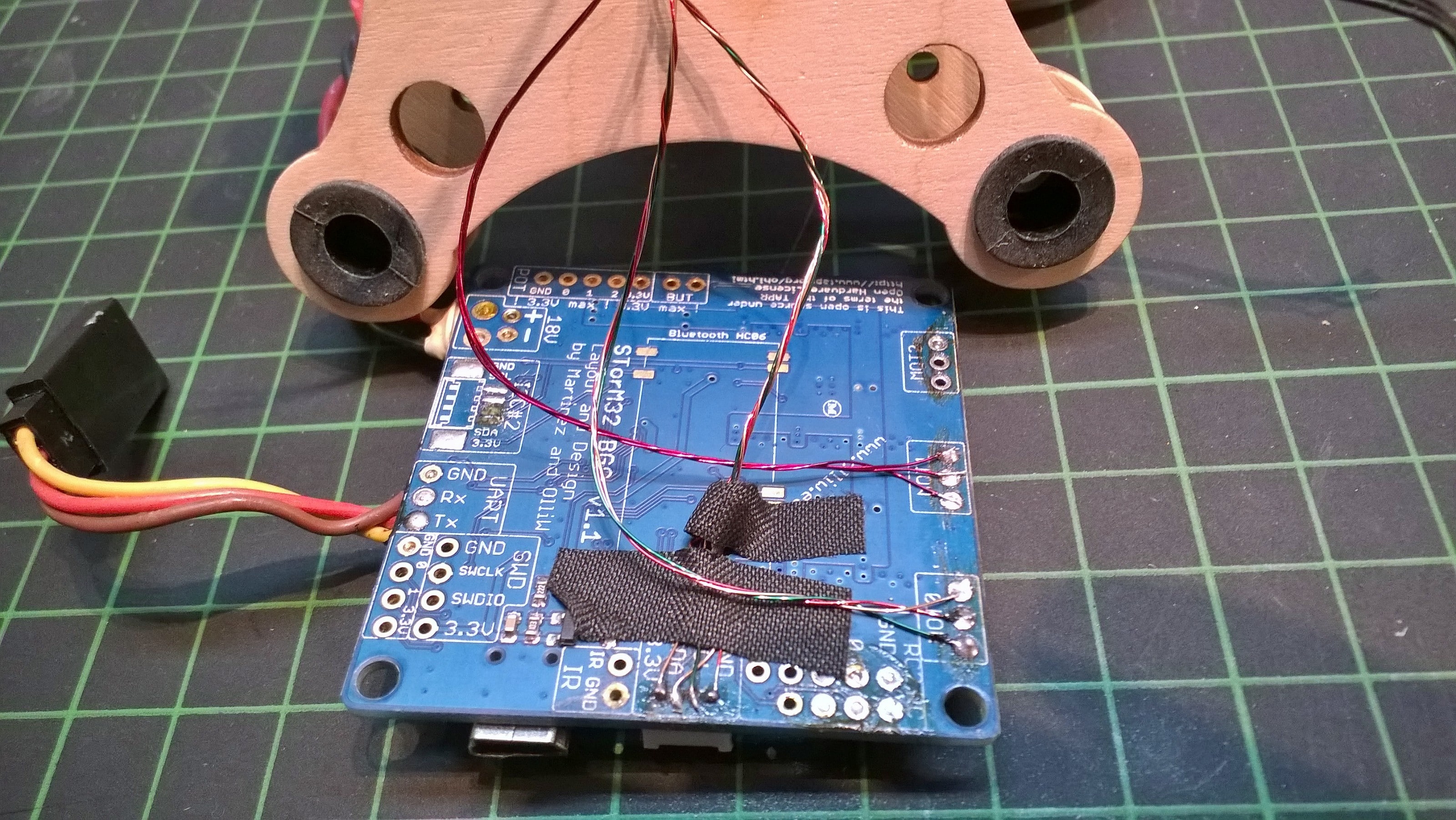
Hast du die Kupferdrähte des Schleifrings gekürzt? Siehe:Attachments:
You must be logged in to view attached files.3. Mai 2016 um 23:22 Uhr #2814TeilnehmerAlso,
-Die Kupferdrähte des Schleifrings waren gekürtzt.
-Ich habe den Schleifring direkt an den IMU anschluss gelötet=> Gleiche Problem
-Ich habe die IMU ohne Schleifring angelötet=> Gleiche Problem
-Ich habe die beiden oberen Punkte mit einer anderen IMU getestet=> Gleiche Problem
-Ich habe alles mit 2S sowie mit 3S getestet=> Gleiche ProblemDer Fehler tritt immer erst in dem „Configure Gimbal Tool“ vor, nach dem schritt wo der Lipo angeschlossen werden muss.
Gruß
4. Mai 2016 um 7:23 Uhr #2815EagleEiAdministratorOk, spannend! Dann stell mal in der GUI die alle drei Motoren auf disable und Speicher mit „write&store“ dann verbinde dein Akku erneut und es sollten keine IMU ERRORS auftreten. Als nächstes mal den Motor1 an, wenn keine Errors auftreten dan den MOT2 und so weiter. Ab wann treten dann die IMU Fehler auf?
Sende mal ein Bild von deinen Motor PIDs
Am besten wir Wechsel an dieser Stelle in unser Stuhlkreis STORM Einstellungen, damit es hier zur Verkabelung nicht verwirrt.4. Mai 2016 um 18:00 Uhr #28185. Mai 2016 um 10:01 Uhr #2838EagleEiAdministratorIch habe hier ein paar ergänzende Tipps zum Aufbau beschrieben!
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.