Open DIY Projects › Stuhlkreis › EagleEi Gimbal 360° › Verkabelung für das EagleEi 360° Gimbal
- Dieses Thema hat 38 Antworten sowie 8 Teilnehmer und wurde zuletzt vor 10 Jahren, 2 Monaten von
 EagleEi aktualisiert.
EagleEi aktualisiert.
-
AutorBeiträge
-
7. November 2015 um 18:24 Uhr #1388EagleEiAdministrator
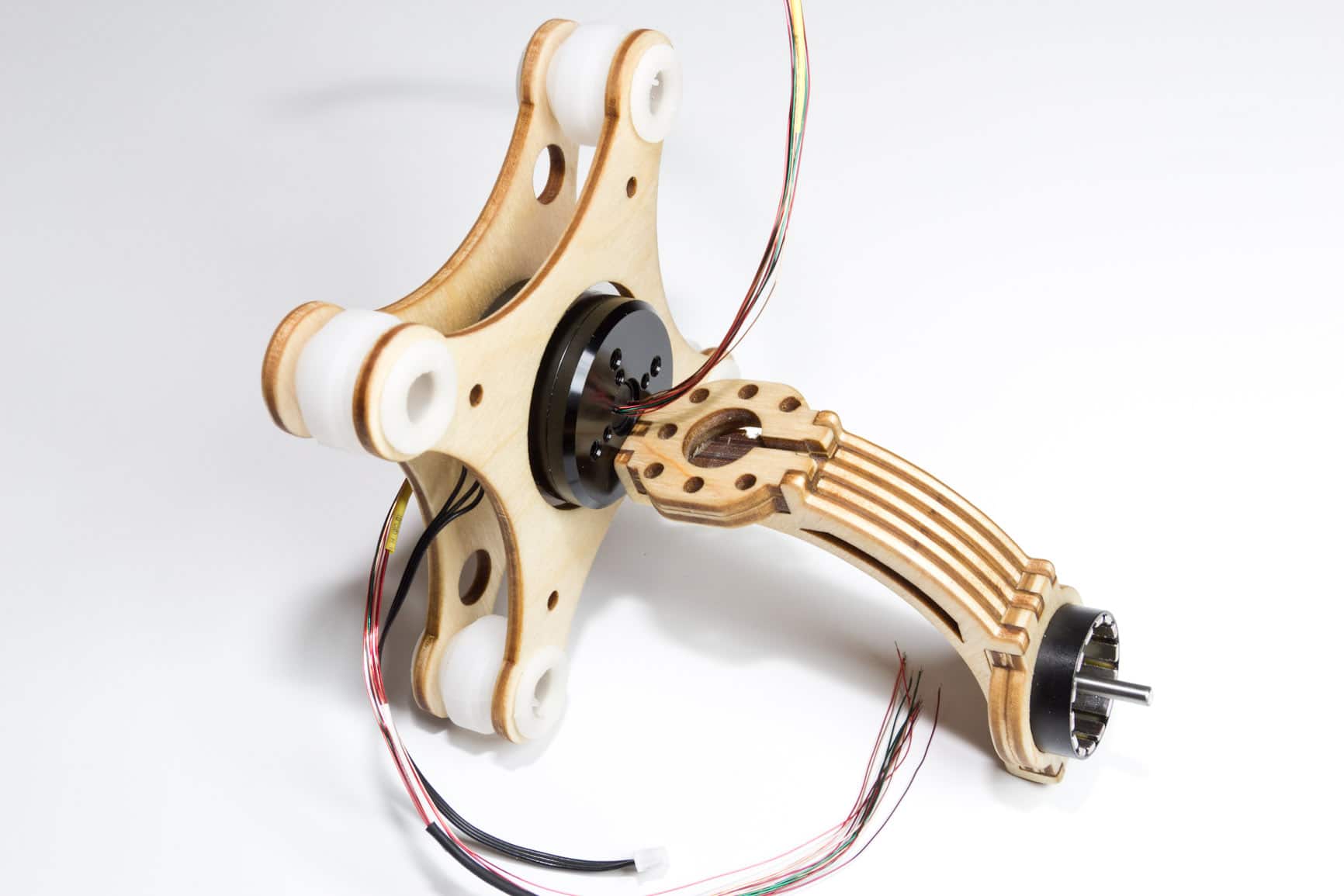
Zunächst die Walkera Motoren für ROLL und NICK in die Schwinge verkleben, ich empfehle 2K Harz


In die obere Schwinge nun die Motorglocke der RollAchse einpressen, sollte auch ohne Kleber gut sitzen! Zuvor muss die Achse der Glocke gekürzt werden

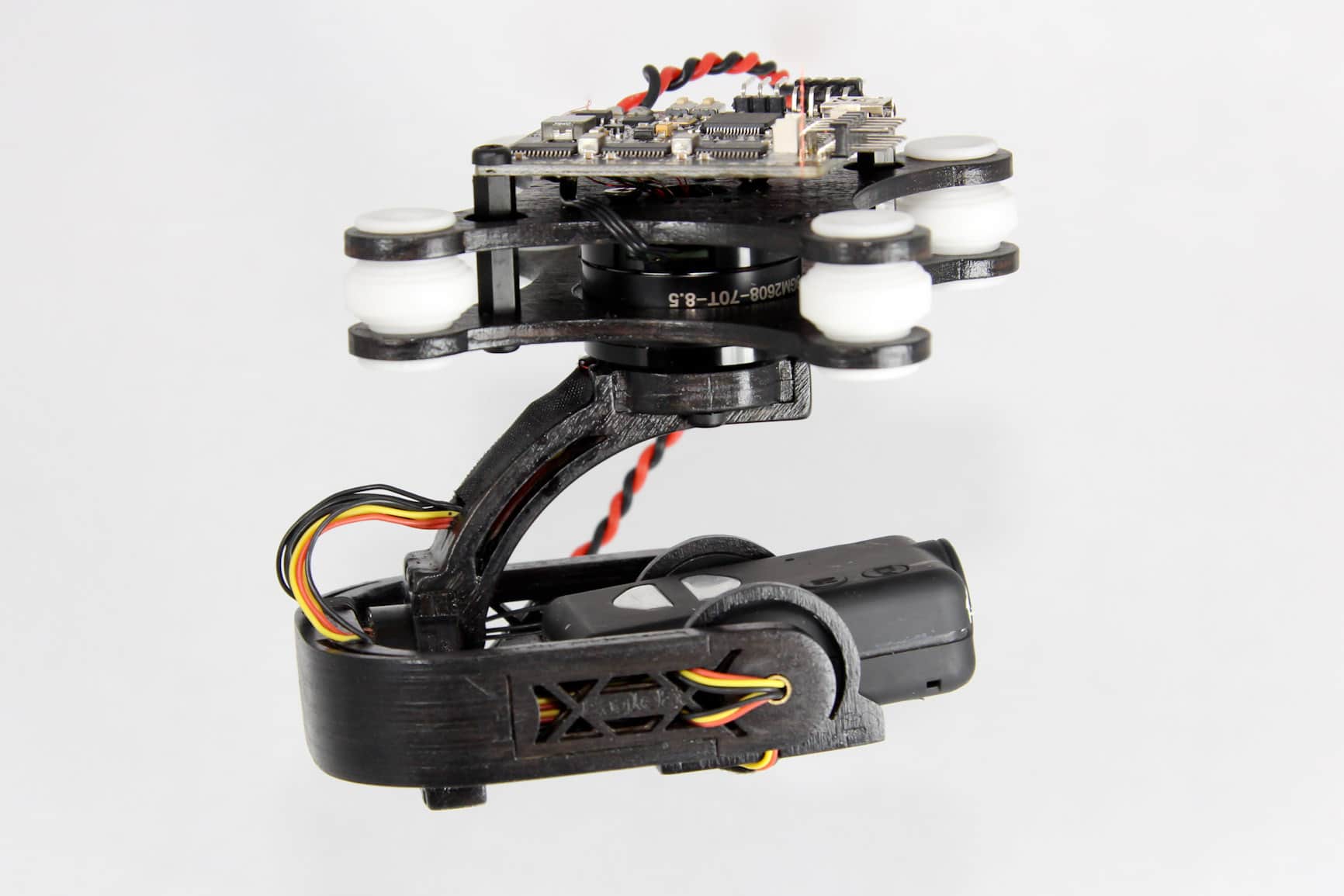
Aufbau der Dämpferplatte und der YAW-MOTOR


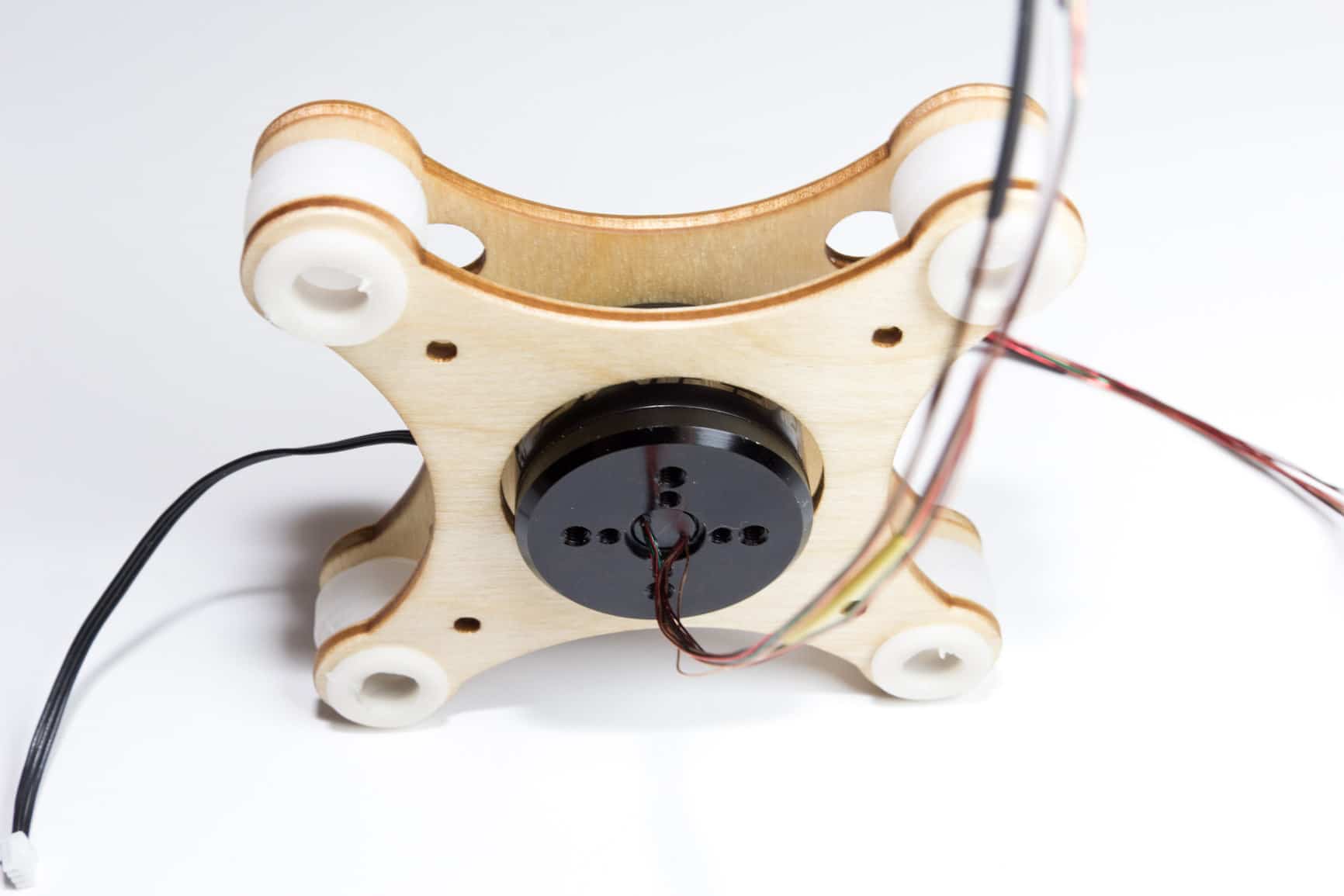
Nun die Drähte des Sliprings anpassen und etwas biegen
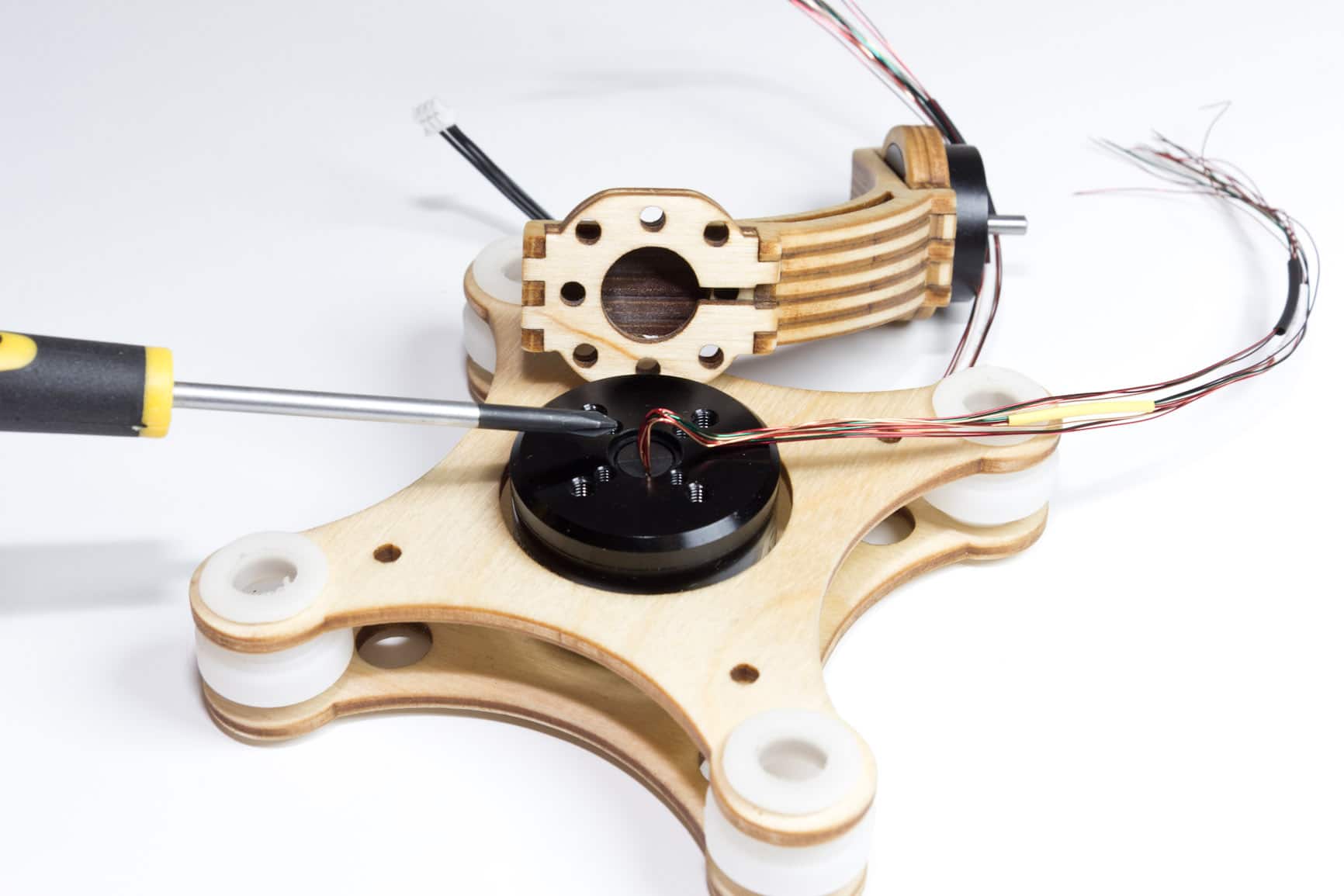
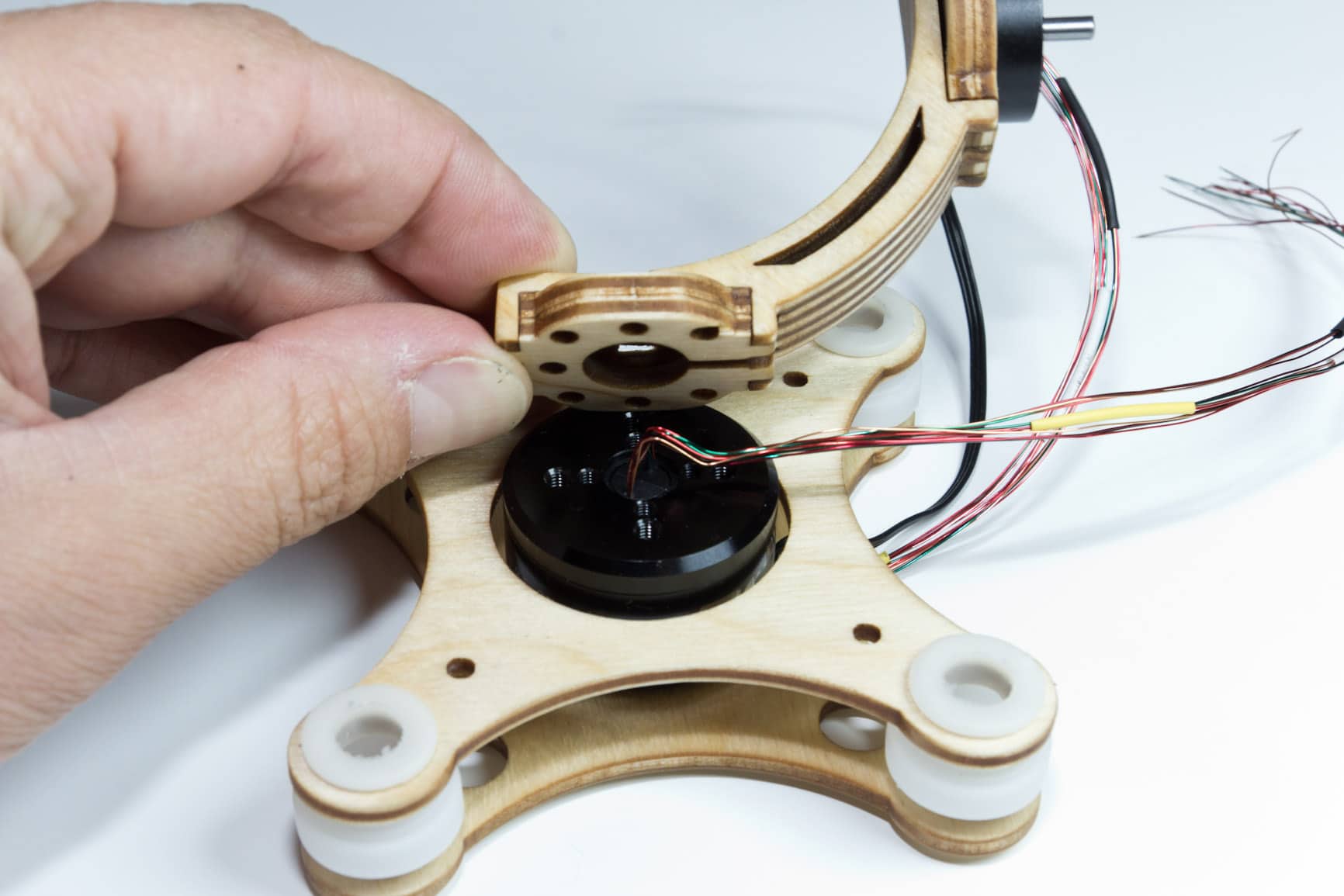
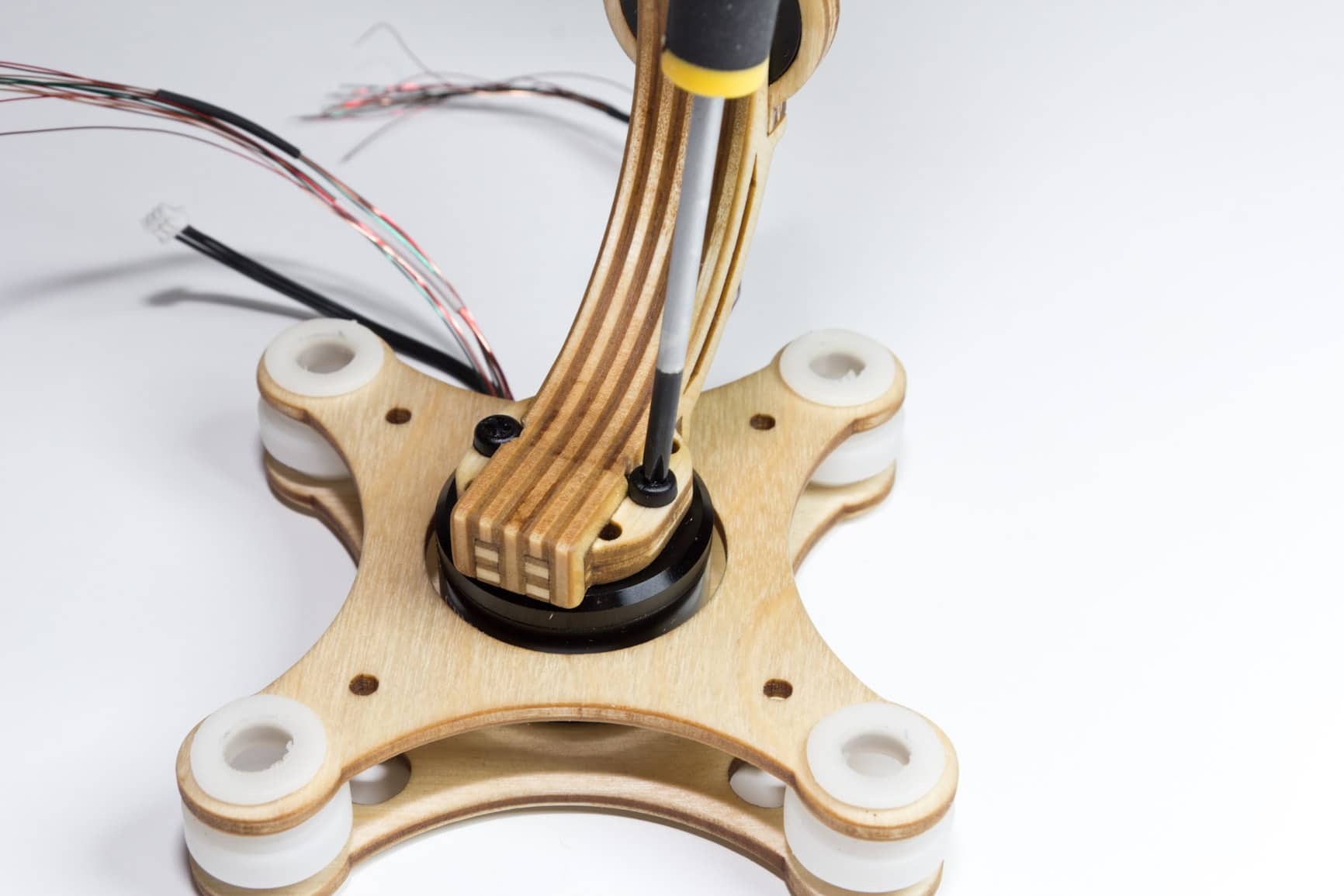
Die Kabel der Schwinge noch etwas fixieren, hier nehme ich Sekundenkleber
 7. November 2015 um 18:59 Uhr #1412EagleEiAdministrator
7. November 2015 um 18:59 Uhr #1412EagleEiAdministratorUnd hier mal de Variante für die Mobius
Zunächst die USB-AV-OUT Verkabelung
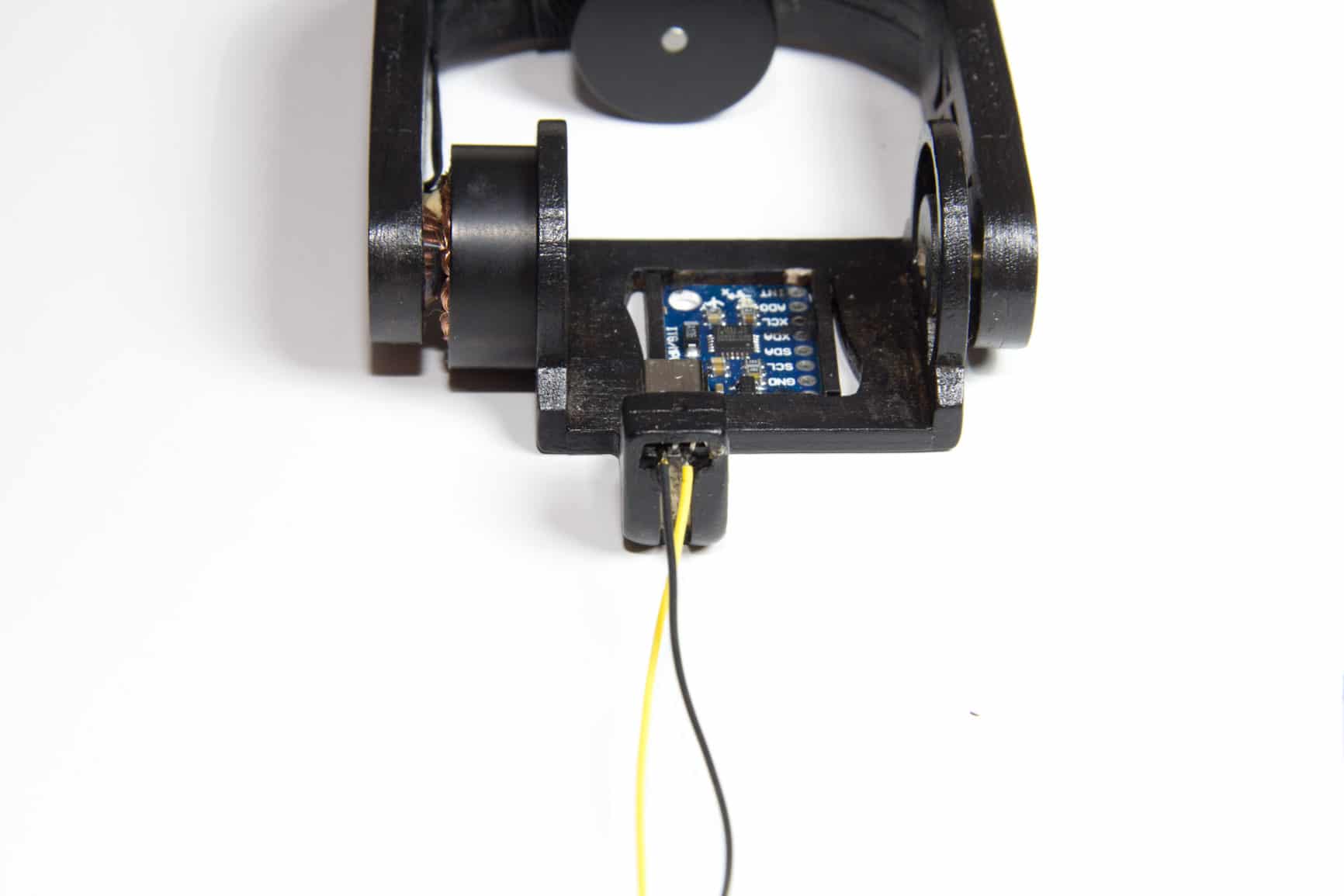
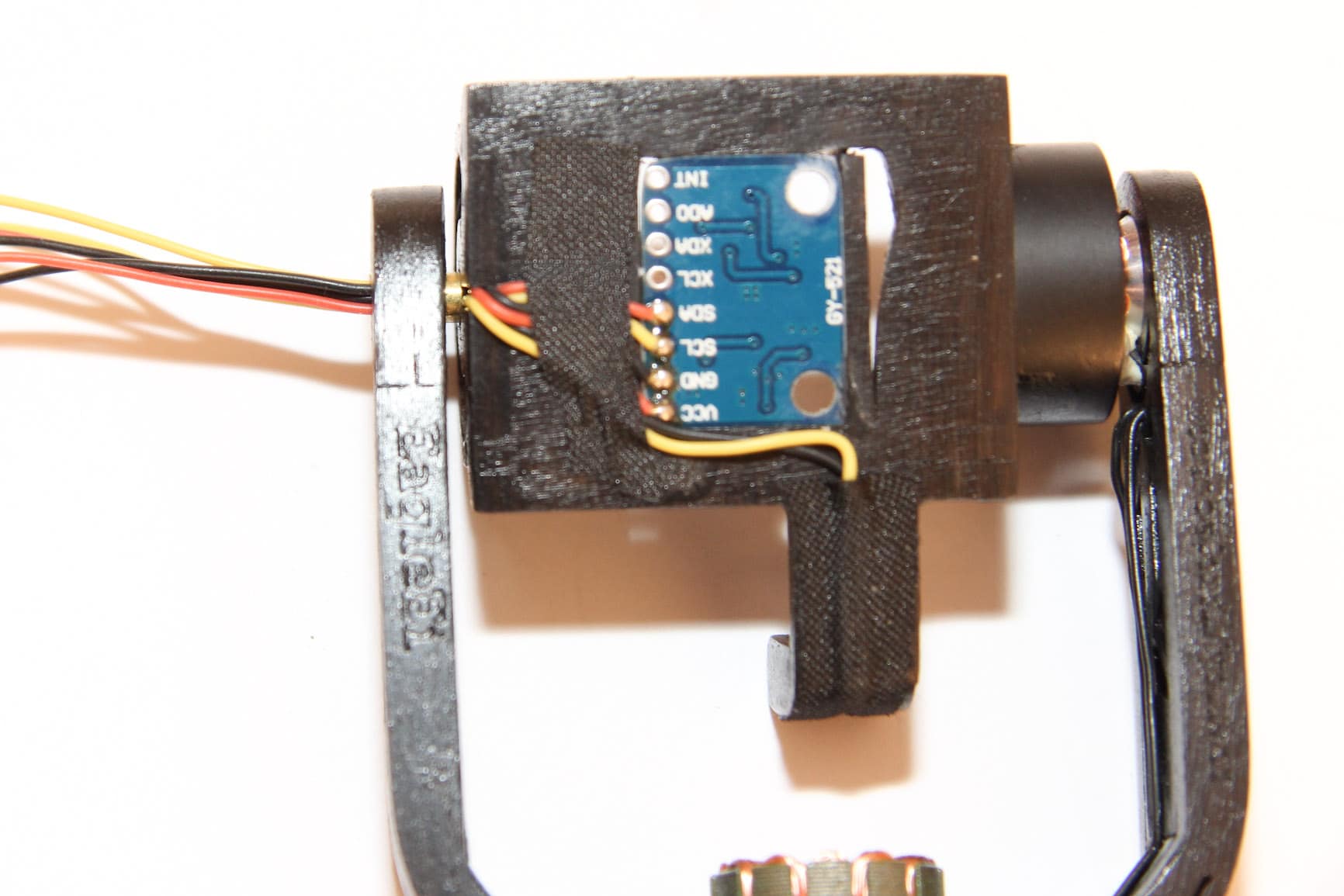
Hier der Sensor
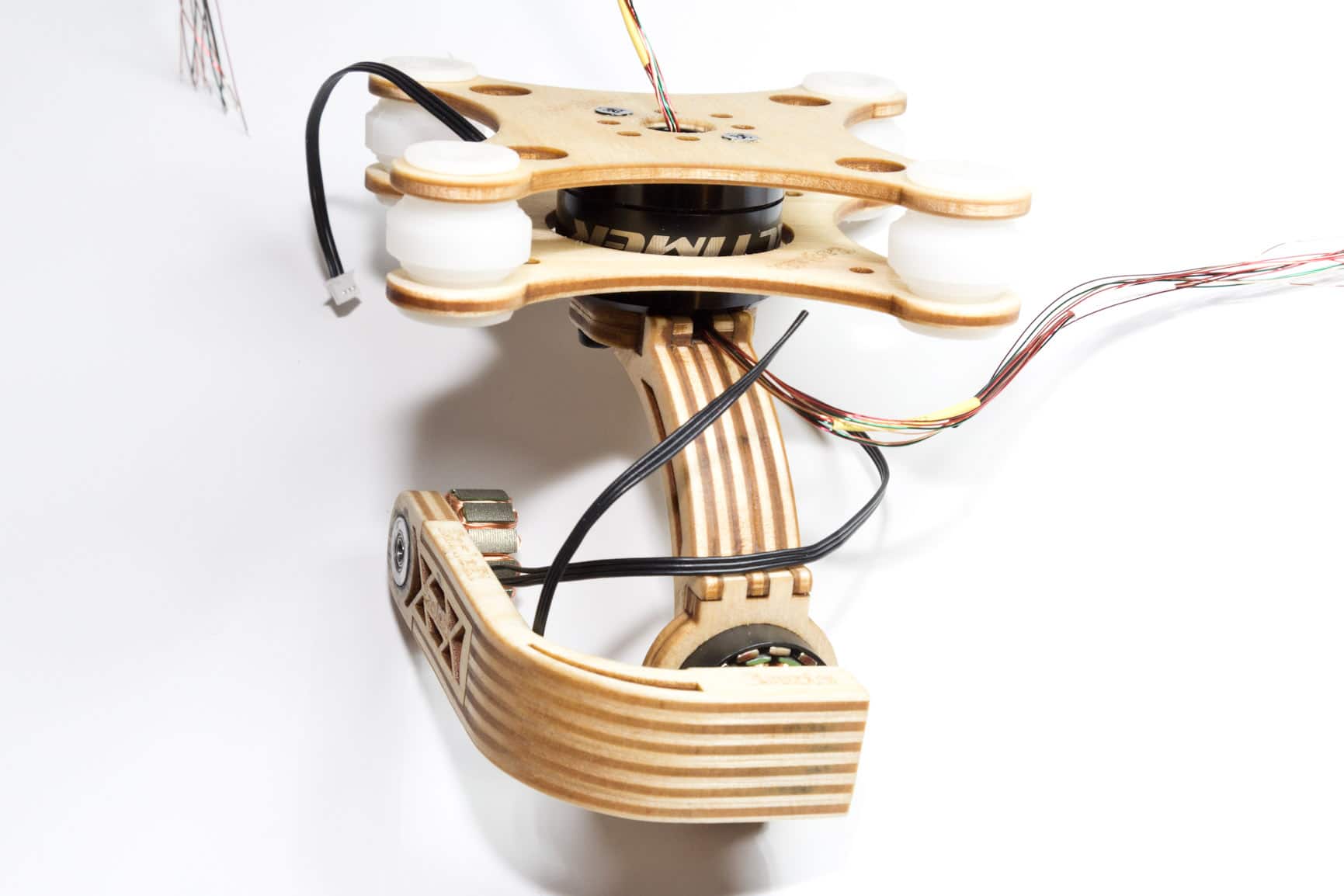
Nun die Silikon Kabel durch die Schwinge, durch das Messingrohr
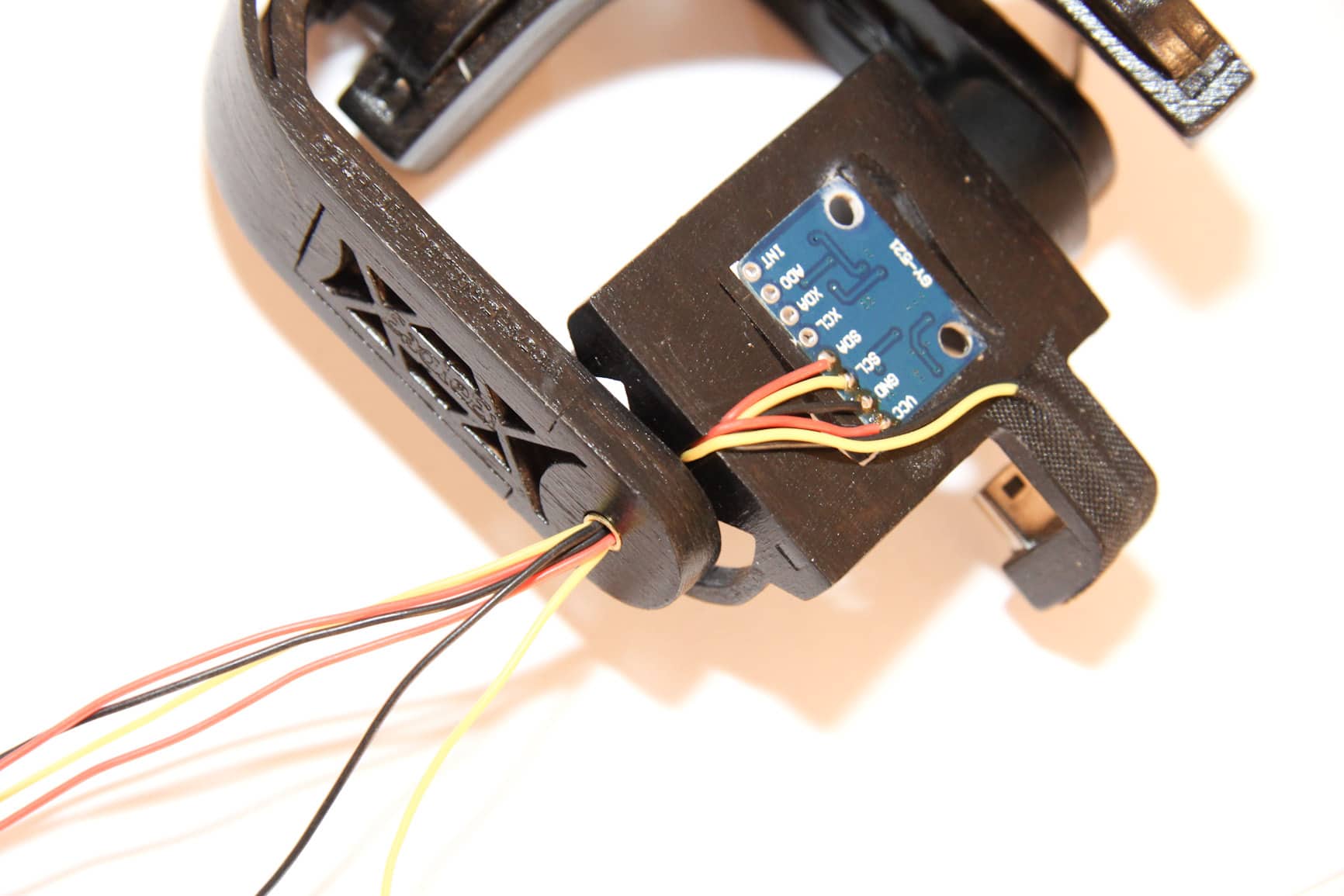
Nun die Drähte vom Slipring mit den SensorKabel und USB-AV Kabel verlöten.
Zum isolieren habe ich flüssig Latex, zb. von efco genommen, klasse Zeugs, besser als Nagellack und besser als Schrupfschlauch (zu dick)!
WICHTIG: Nicht wie ich die Dämpferplatte beim verlöten vergesse! 😉

Hier mit Dämpferplatte:
Noch etwas schön machen und fertig:

 7. November 2015 um 19:18 Uhr #1416EagleEiAdministrator
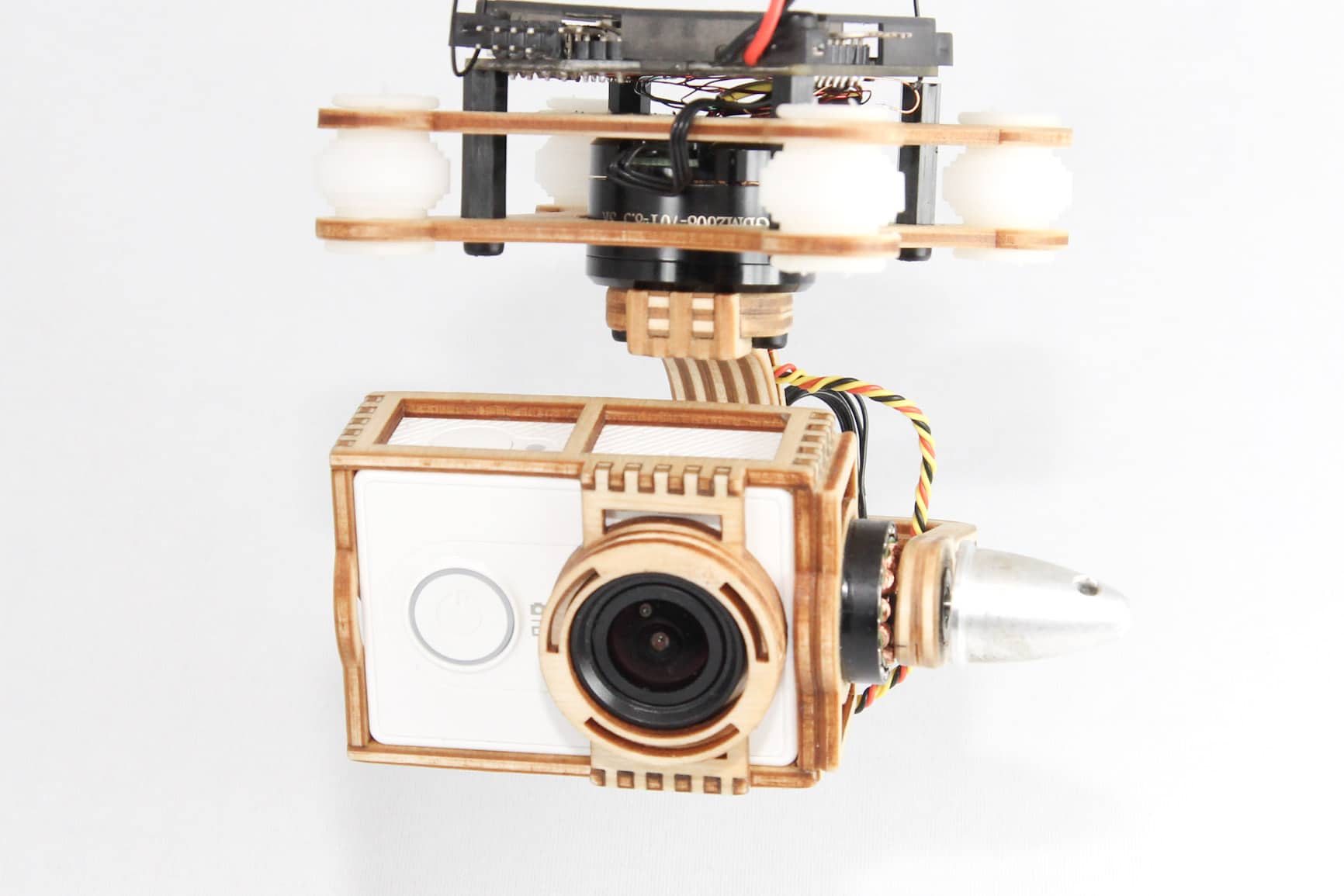
7. November 2015 um 19:18 Uhr #1416EagleEiAdministratorUnd hier noch die Verkabelung für XIAOMI
Und hier dann auch in schön:

 29. November 2015 um 14:00 Uhr #1606EagleEiAdministrator
29. November 2015 um 14:00 Uhr #1606EagleEiAdministratorAlle EagleEi Gimbals, ob die 360° Versionen oder das ältere 3axis sollten mit 7,2V betrieben werden! Somit wird die Funktion und die Fehlerquote der IMU-Errors extrem verringert und die Gimbals laufen stabil!
Ich löse dies in dem der mitgelieferte Balancer 3S Stecker auf 2S umgelötet wird!
So werden die Akkus zwar ein wenig einseitig belastet, was aber bei dem geringen Verbrauch und dank den Balancer Ladegeräten kein Thema ist!Das Verlöten
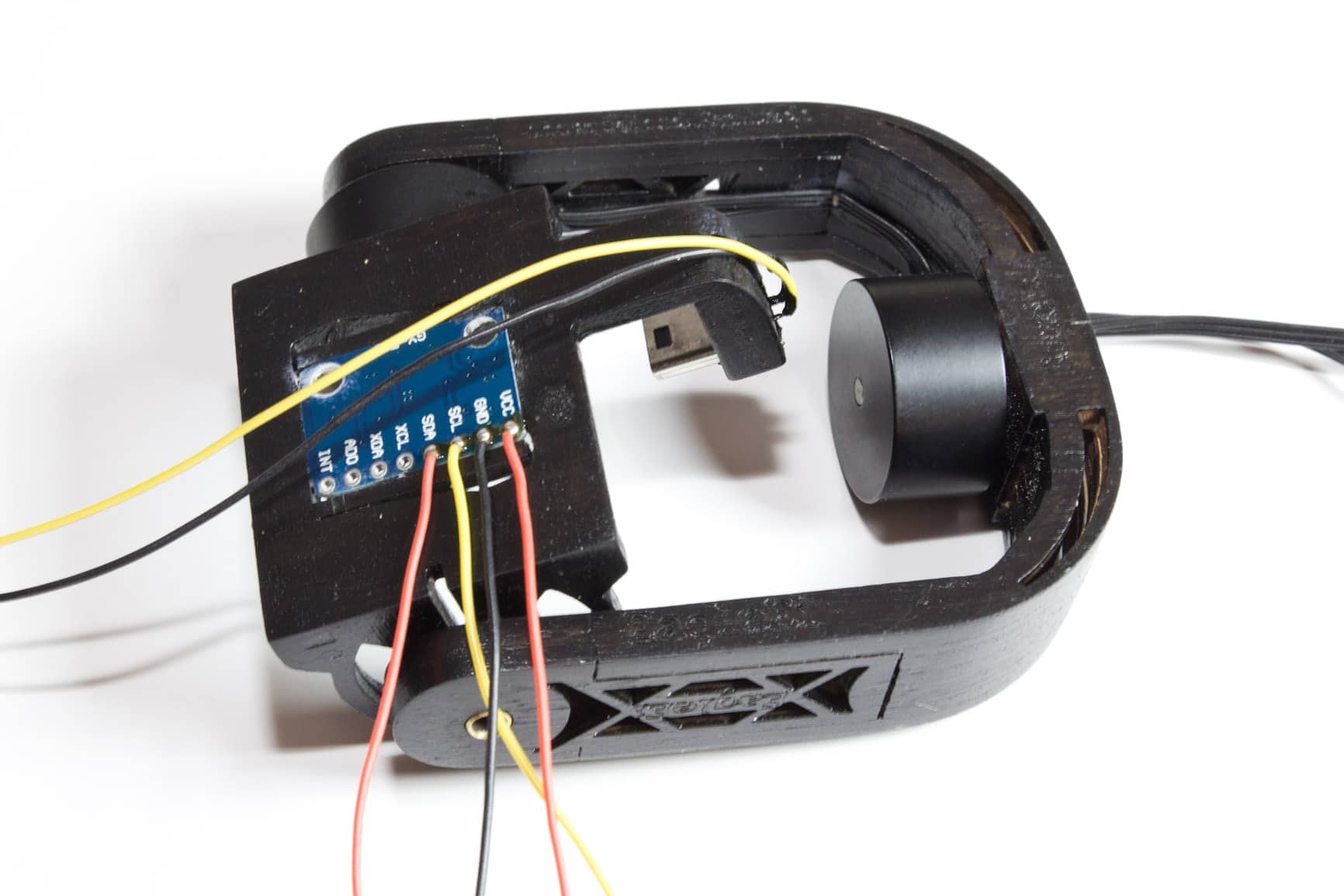
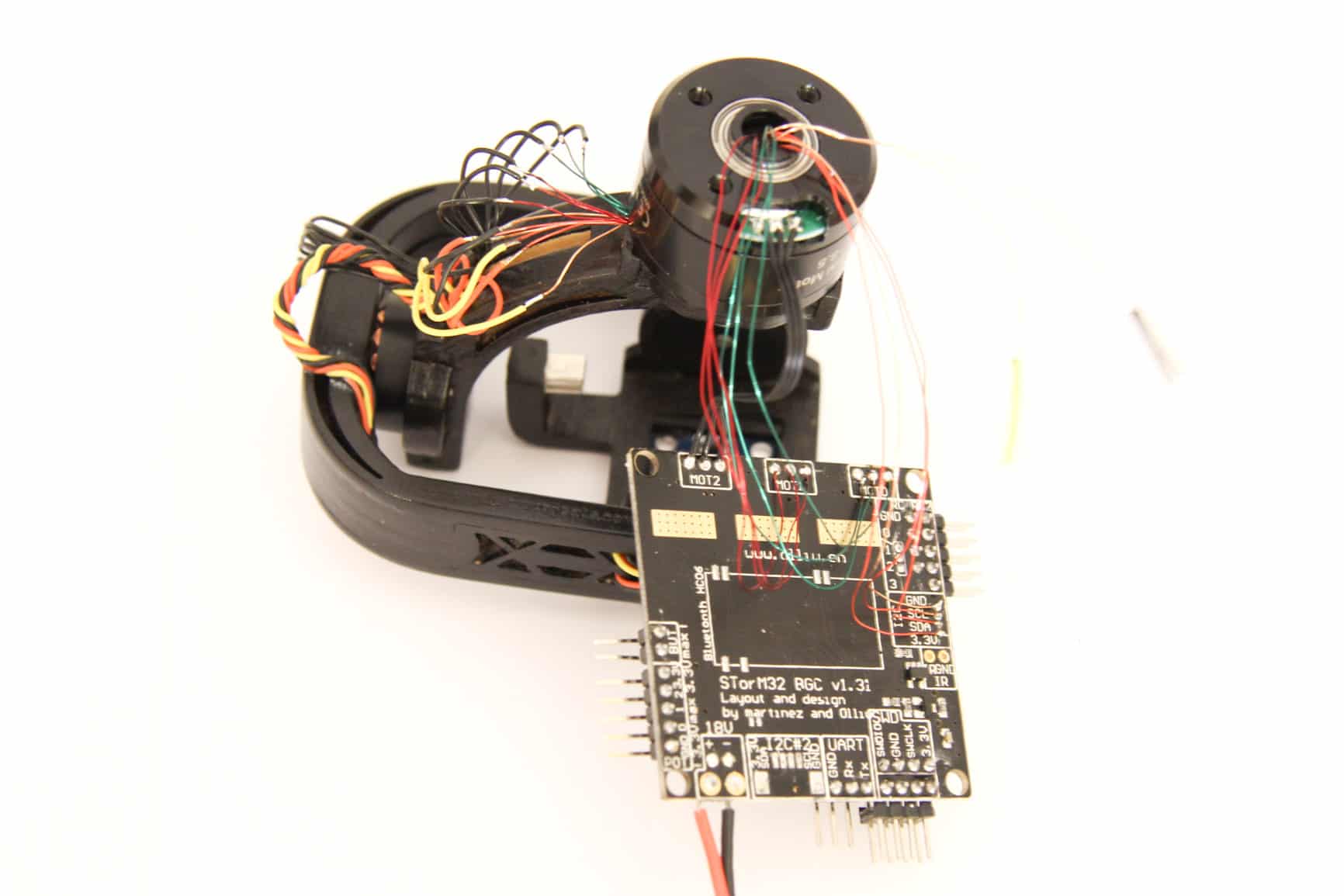
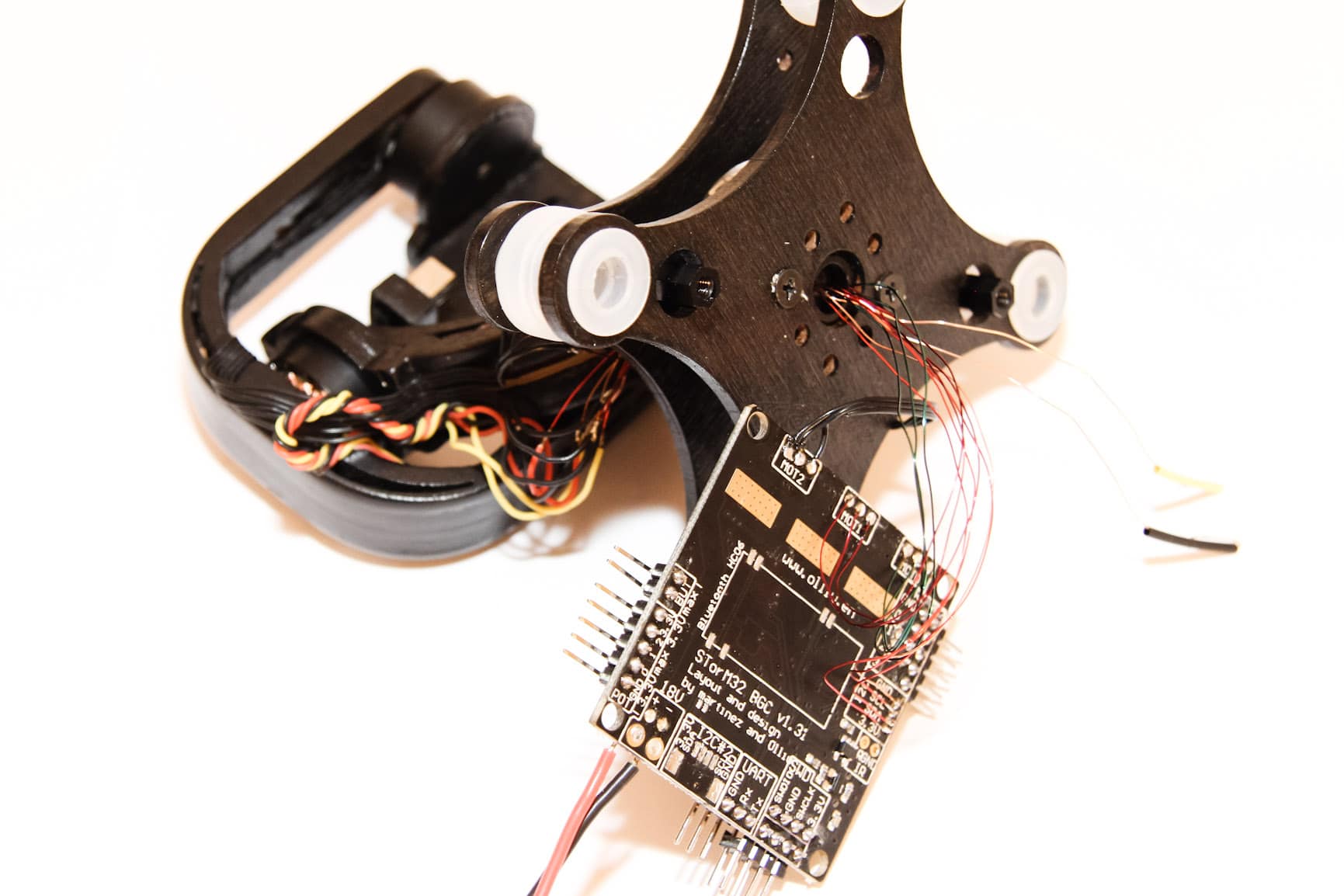
Auf dem Controller müssen 4 Drähte an den IMU Port, GND,SDA,SCL,5V, ich löte diese immer gern direkt auf die Pins an der Unterseite des conrollers, (ich mag keine Steckverbindungen) dann noch die drei Motoren, auch gelötet in meinem Fall!
Der YAW-Motor wird direkt ohne Slipring angelötet!
Dann sollten noch zwei Drähte des Sliprings frei sein, diese kann man für evtl. AV-Out hernehmen.WICHTIG!!!
Die Drähte des Sliprings für den Sensor, ebenso für die Motoren jeweils miteinander verdrillen, das verringert die Einstreuungen von Störungen durch die Motoren auf den I2C Bus!
Ebenso sollten diese Drähte unterhalb des Controllers möglichst nicht Parallel zu einander verlegt sein, also idealerweise die Motorkabel etwas zu den Sensorleitungen distanzieren.
Es hilft auch ein kleiner Entstörungs-Ferrit, aber bitte nicht das Riesen Teil was meist schon an den Sensorkabeln dran ist, sondern ein mini 2mm Ferrit.
Dieser hier:FERRITich werde noch ein paar Bilder nachreichen!
10. Dezember 2015 um 0:31 Uhr #1679Twan
TeilnehmerKursiert hier eventuell irgendwo schon ein Thread bezüglich der Verlötung der Drähte? 🙂 Komme wahrscheinlich die nächsten Tage dazu und würde mich gerne vorab informieren.
10. Dezember 2015 um 19:43 Uhr #1681Plattenwerk
TeilnehmerIch hab gelesen, daß verdrillte Drähte weniger beweglich als Einzelne sind. Deshalb kommt auch Flachbandkabel nicht in die Tüte. Sieht aber weniger aufgeräumt aus.
13. Dezember 2015 um 18:30 Uhr #1686EagleEiAdministratorJA, das verdrillen macht oft die Kabel unbeweglicher, allerdings sind gedrillte Leitungen viel weniger Störungsanfällig, ideal sind dünne Silikonleitungen, ich verwende hierfür AWG 30 Kabel zb. hier via ebay
In diesem Beitrag werde ich nach und nach auf die Fragen soweit wie möglich eingehen und auch noch Bilder liefern.
16. Dezember 2015 um 14:32 Uhr #1710Okke Dillen
TeilnehmerSodele, endlich mal ein weiteres Bild. Sollte es kontextuell hier nicht so recht passen, bitte in einen passenderen Fred schieben 😉
Änderung:
ich befand den Rollachsenmotor in umgekehrter Montageanordnung für geschickter, weil die Motorkabel dann eine Bewegungsachse weniger haben. Also die Motorglocke an die Gabel und den Anker an den Gier-Arm.Attachments:
You must be logged in to view attached files.16. Dezember 2015 um 14:36 Uhr #1712TeilnehmerMit dem Gier-Motor bin ich evtl nicht so glücklich… wenn ich diesen Fred hier früher gesehen hätte, wäre mir der Motor mit der Hohlwelle und Schleifring früher aufgefallen. Mist.
Ich hoffe mal, der Walkera-Motor schafft trotzdem die Belastung um die Gierachse?
Gibts den Schleifringmotor irgendwo in Europa? Link?PS: Benny, könntest du die Link Farbe auf etwas erkennbareres (Kontrast) ändern als ausgerechnet „fad-grau“? ZB bläulich? 😉
16. Dezember 2015 um 18:51 Uhr #1713EagleEiAdministratorHallo Okke,
dein Konzept sieht kreativ aus! 😉 … warum nicht!?Also, zunächst ja, dein YAW-Motor umgekehrt ein zu bauen, sollte gehen, das ist im Grunde ein gute Idee, die Frage ist nur wie du Ihn befestigen willst? …machbar ist alles!
Den Motor an der Rollachse zu drehen, halte ich eher für ungeeignet, auch wegen der Befestigung, theoretisch sollte es aber auch gehen und deine Kabel wären dann auf der andren Seite, wenns für dich besser ist, klar auch gut.
Generell hast du allerdings das Mobius 360° bestellt und erhalten, also die Version mit dem Walkera-YAW-Motor, du kannst aber auch jederzeit ein 3axis daraus machen, die Motoren reichen dafür und es wird ein wenig leichter, eben mit der Einschränkung dass du dir (nur) ca. 180° YAW ausreichen müssen. Schau einfach in den BEREICH bzw. hier BESCHRIEBEN Hierfür empfehle ich dir aber als Schwingungsdämpfer die Mobius 3axis Version zu nehmen, diese ist auf den Walkera Motor angepasst. Bei Bedarf schaue ich ob ich noch etwas auftreiben kann.
Natürlich kannst du dir auch den 360° Schleifringmotor zulegen und jetzt noch ein 360° daraus machen.
Leider können wir an dem FORUM-PLUGIN derzeit nichts ändern.
Falls du weiterhin ein 3axis bauen möchtest, so bitte ich dich zukünftige Fragen auch DORT zu stellen, hier bitte nur Fragen zur Verkabelung der 360° Version!
16. Dezember 2015 um 19:29 Uhr #1717TeilnehmerDanke für die rasche Antwort! 🙂
Gut, wenn der WK-Motor ausreicht, dann bleibts dabei.
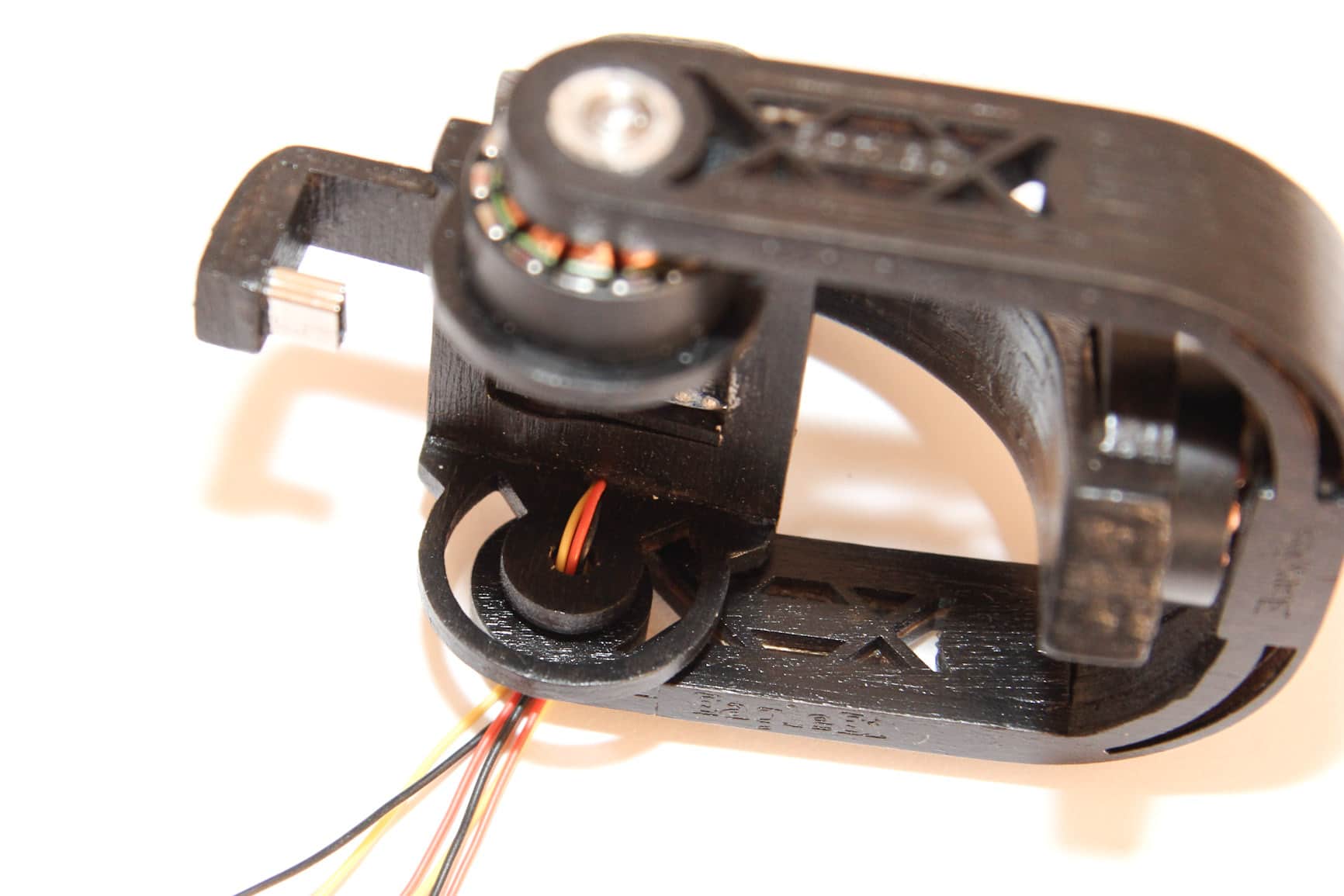
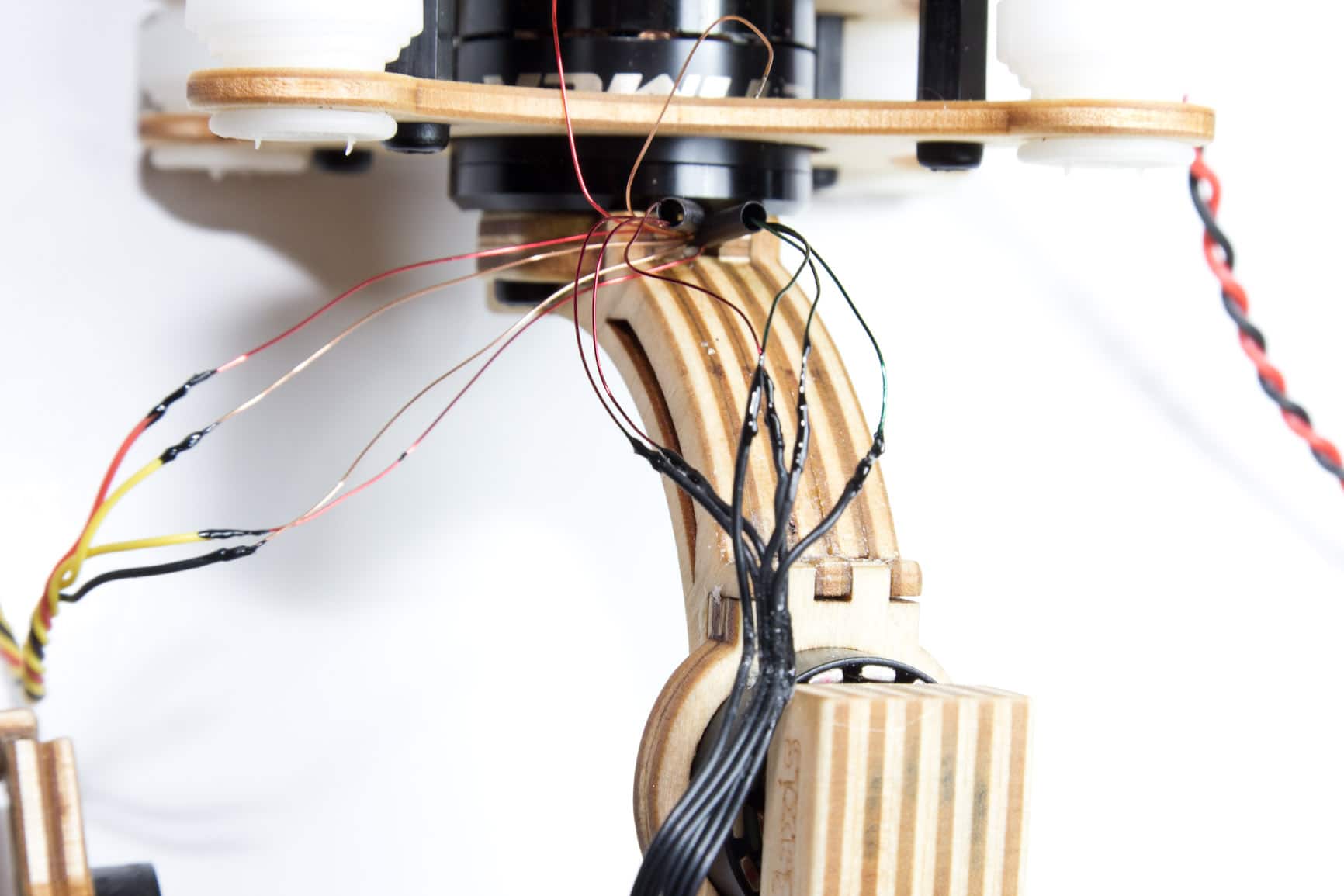
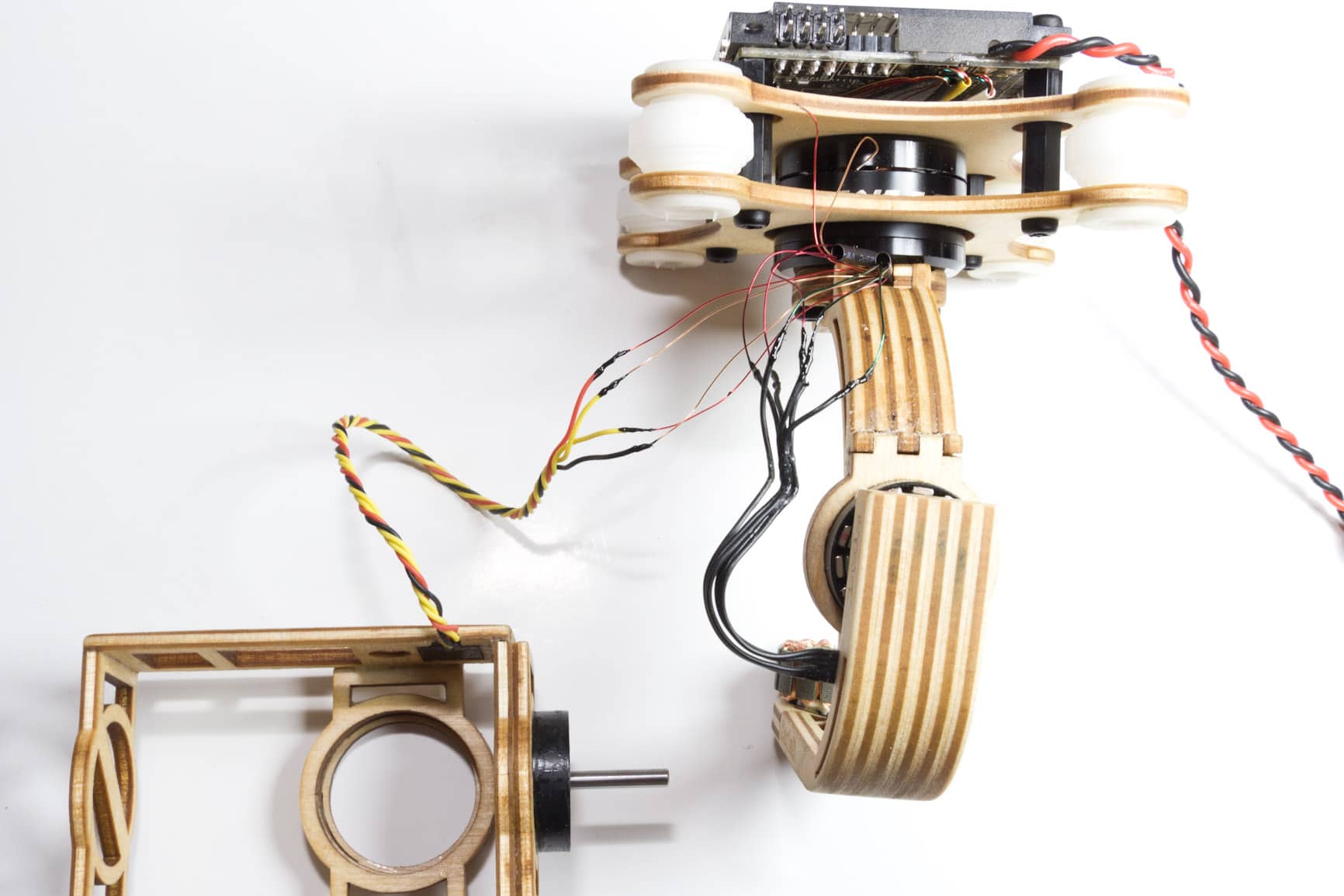
Schau dir mal die Gabel an (Zoom), dann erkennst du, wie der Roll-Motor befestigt ist. 😉Roll-Motor (für die Gabel):
Anstelle der Viereckaussparung in der Gabel habe ich eine Kreistasche „erdremelt“, in die die Motorglocke eingelassen wird (Epoxy).
Vorteil für die- VERDRAHTUNG
dabei ist, daß sich der Anker mit den daran befindlichen Kabeln NICHT drehen muß. Er ist inkl seiner Anschlußkabel fest am YAW-Arm. Es sind dann 3 Strippen weniger, die also
a. nicht bewegt werden müssen und
b. nicht „malerisch“ in die Landschaft ragenDie einzigen Kabel, die nun noch auf den YAW-Arm übergeben werden müssen, sind
– die der Kamera (3Stk)
– die der Sensor-Platine (4Stk)
– die des Nick-Motors (3Stk, auch oft als Pitch-Motor bezeichnet)Es sind somit nur 10 anstatt 13 Litzen, die von der Gabel an den YAW-Arm übergeben werden müssen 😉
Ein weiterer Vorteil ist, es baut dünner, flacher, kürzer…ähh… ja was denn nu? Hach wie drück ich es aus? Will sagen, es trägt nicht so dick auf, weil die Motorglocke ein gutes Stückweit im „Fleisch“ des Gabelholzes eingelassen wurde (per Dremel). Durch die formschlüssige Verklebung (Epoxy) der Gabeltasche mit der Motorglocke erhält die Gabel ihre ursprüngliche Stabilität zurück, die sie durch die Ausdremelei zunächst verloren hatte.
YAW- oder zu deutsch Gier-Motor:
Dasselbe gilt für den YAW-Motor (Gierachse). Im Falle einer Durchführung à la Schleifring (360°-Betrieb) bedarf es somit 3 Anschlüssen weniger in der Durchführung, weil die Motorkabel am festen Teil des Motors sind und nicht am sich drehenden. Sie können also direkt zur STorM-Platine und müssen nicht irgendwo durchgeführt werden.
Das war die Idee dahinter 😉
16. Dezember 2015 um 20:15 Uhr #1718EagleEiAdministratorJA die Idee ist gut und ohne Scherz ich freue mich wenn neue Impulse und Ideen einfließen!
Versuche es und berichte ich bin sehr auf die Ergebnisse gespannt, wer weiß evtl. wird eine kommende Version des EagleEi Gimbals auf deine Ideen zurück greifen!?Falls du noch einen Draht einsparen möchtest, die Cam kannst auch ohne Stromversorgung betreiben, also nur Masse und Video Signal!
Viele Erfolg!
29. Dezember 2015 um 16:58 Uhr #1891gustlp89
TeilnehmerHallo EaglEi,
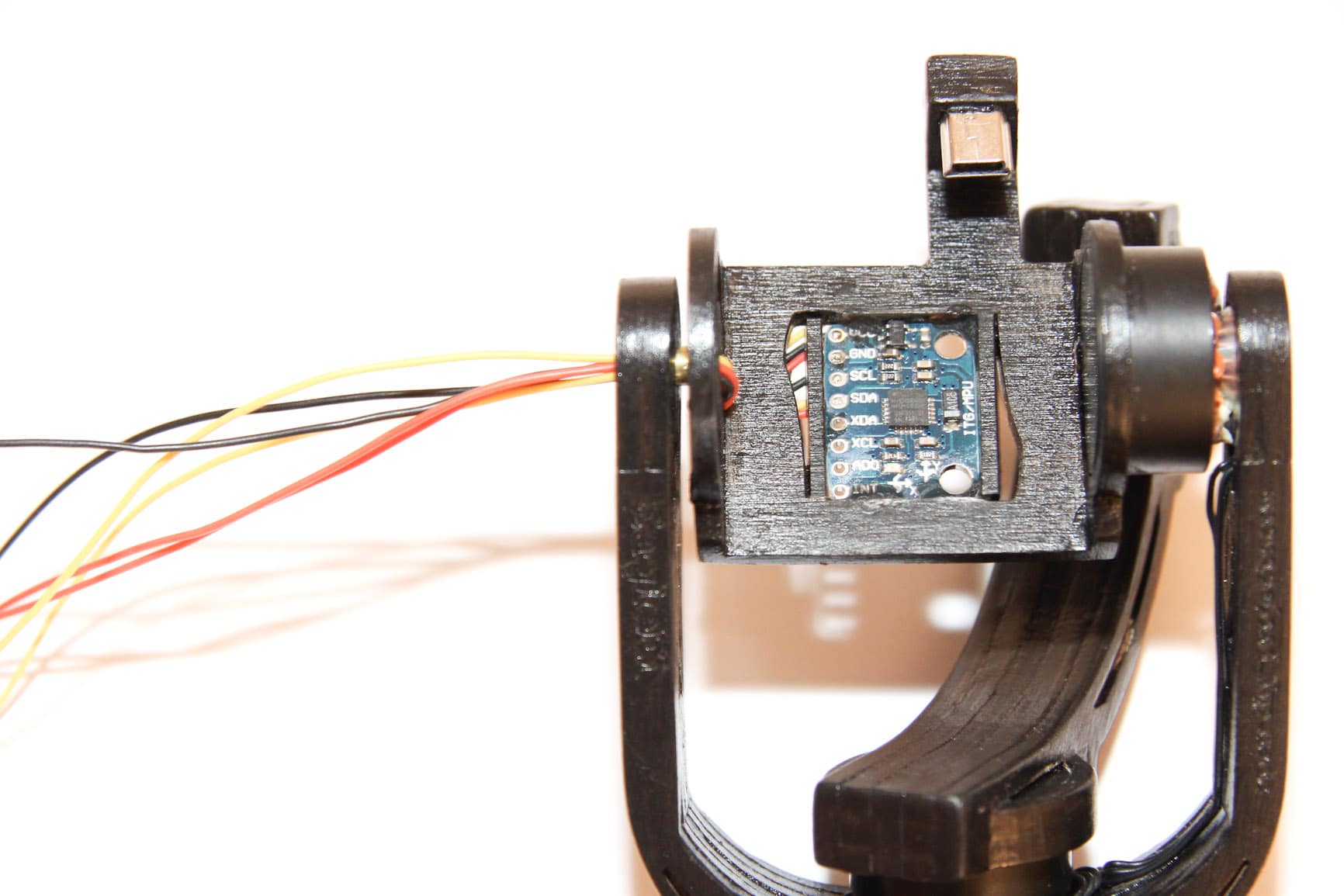
ich bräuchte kurz Hilfe bei der Ausrichtung des IMU im Kamerahalter.
Auf meiner IMU ist ein Pfeil mit X gekennzeichnet.Ich habe das bestimmt auch schon irgendwo gelesen nur wo? )-:
Ich würde den Pfeil jetzt Richtung der Pitch-Rotationsachse einbauen!
Vermutlich kann mann das softwareseitig auch noch definieren, aber wenn es eine vorgegebene Einbaulage gibt würde ich das gerne umsetzen!Vielen Dank schon mal!
Grüße ChristianP.S. Bekomme gerade das Grinsen nicht aus dem Gesicht bei dem Fortschritt!
Attachments:
You must be logged in to view attached files.29. Dezember 2015 um 22:18 Uhr #1896EagleEiAdministratorHallo Christian,
ja man kann den Sensor in allen AusRichtungen verbauen und in Ollis GUI Einstellen
schaumal HIER ist das Bild was du meinst?Ich nehme das Bild immer auf Papier zu Hand und drehe es so hin wie der Sensor verbaut liegt, in deinem Fall müsste dann in der GUI als IMU1 die „no12“ Position passen, Z:unten, X:links, Y:nach vorn!
Ps. Das Grinsen hatte Georg und ich vor einer Stunde auch an der Stelle, gell Georg! 😉
Gruß Benny
30. Dezember 2015 um 1:58 Uhr #1904 GeorgModerator
GeorgModeratorOh ja 🙂 Mein Gimbal funktioniert Jipie !!!!!!!
Springe schon den ganzen Abend damit durch die Wohnung (meine arme Freundin 🙂 )
Habe da noch ein Experiment gewagt, und mir extra Platinen zum anlöten der Schleifringkontakte gefräst. Bin Schreiner und nicht gerade der Lötmeister.
Dachte so mache ich es mir einfacher (frei nach dem Motto: faul darf man sein, nur nicht blöd).
Leider wurden daraus doppelt so viele Lötstellen, die Lödpads lösten sich beim löten wieder ab so das ich sie mit Sekundenkleber fixieren musste, und bessere Lötstellen bekam ich trotz (oder wegen) 3 Bier auch nicht hin. Nun ja,somit erhielt ich den Vorteil meine Lötstellen gut durchmessen zu können.
Egal, es funktioniert hätte es selber nicht gedacht, und meine Meisterlötstellen verschwinden gerade unter einer Latexisolierung.
Bilder findet ihr hier.
Habe einen neuen Thread aufgemacht, da dies wohl der erste Gopro EagleEi Gimbal ist.
Und vielen Dank an Benny für den Support, das Projekt und die Geduld mit Pappnasen wie mir. -
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.