Open DIY Projects › Stuhlkreis › EagleEi Gimbal 3axis › STorM32 BGC Firmware, Grundeinstellungen und GUI
- Dieses Thema hat 66 Antworten sowie 10 Teilnehmer und wurde zuletzt vor 10 Jahren, 3 Monaten von
stephan75 aktualisiert.
-
AutorBeiträge
-
15. April 2015 um 7:42 Uhr #942
 miataModerator
miataModeratorMoin Benny,
überschwingen tuts ja mit den Vmax zumindest nicht, die „stärken“ ja nur die Haltekraft. Das verleitet natürlich diesen Wert hochzudrehen damit die ganze Sache „steifer“ wird.
Schlag mich nicht, ich hab die Werte ,zumindest bei Yaw, bei ca 200 stehen. zuvor hatte ich über 200 und merkte dann dass da was zu riechen begann und das Initial-Pipsen krächtste hörbar… :-/.
Daher hab ich im Moment Yaw bei knapp unter 200, und die anderen Achsen nur etwas über deinen Werten. Der Flug gestern hats gut überstanden. Wird warm, aber noch gut anfassbar.
Ok, ich dreh die Werte mal weiter runter bis es wieder schlechter wird und poste diese dann hier mal. Dachte vielleicht gibt’s schon Erfahrungswerte wie weit man unbeschadet hochdrehen darf. Gut, dann teste ich und wiege ab zw Wert und Temp.Gruß
Micha28. August 2015 um 9:03 Uhr #1056Plattenwerk
TeilnehmerHallo,
ich fummele schon den halben Vormittag … grrrr
Firmware flashen funktioniert.
WIll ich das Board auslesen kommt sowas:Attachments:
You must be logged in to view attached files.28. August 2015 um 9:22 Uhr #1066TeilnehmerSchade daß für den USB-to-Serial Adapter kein 3poliger Stecker auf dem Board ist. Ich habe keine Lust bei jeder Kalibrierung Kabel an- und wieder abzulöten.
Sry… schiebe gerade Frust weil ich zu blond fürs Setup bin. Ich und Elektronik… das ist wie ’n Dreijähriger mit ner geladenen und entsicherten Waffe…
28. August 2015 um 19:58 Uhr #1067 EagleEiAdministrator
EagleEiAdministratorJa ich finde es auch schade, jedes mal bei einem Update an diese Schnittstelle zu müssen, inzwischen steck ich lediglilich 3 Male-Jumper in die Lötaugen! 😉
Hast du den Fehler mit der Verbindung inzwischen hinbekommen? Wenn die Firmware passt und dein Treiber un Windoof richtig installiert wurde sollte es gehen!?
1. September 2015 um 19:06 Uhr #1072TeilnehmerIch werd noch
wahnsinnigungeduldig!Firmware flashen funktioniert. Dann muß der USB-to-serial Adapter raus und das Board mit ’nem ganz stino USB-Kabel angeschlossen werden, richtig? Genau da wird aber kein ’neuer/zusätzlicher‘ USB erkannt und ich kriege immer die obige Fehlermeldung.
Der ‚Read‘ Button ist gegraut, ich kann ‚read controller settings‘ gar nicht ausführen.So langsam verliere ich die Lust an dem Ganzen. Irgendwann trete ich es in die Tonne
1. September 2015 um 23:21 Uhr #1073EagleEiAdministratorDas werden wir doch noch hinbekommen! Die Firmware ist drauf, bist du sicher?
Wenn ja sollte dein Controller via USB anheschlosseen werden und einen Treiber installieren, dann sollte sei Rechner einen neuen COM Port finden und dein Controller angesprochen werden.
Erkennt dein Computer in den Geräteeinstellungen den Controller anbeinem COM port? Vermutlich nicht, dann hat es bei dir denbZreiber zerschossen. Nochmal löschen und nochmals an einem anderen USB Port neu installieren.6. September 2015 um 8:58 Uhr #1100TeilnehmerHallo,
ich bin einen Schritt weiter: das USB Kabel hatte einen weg *grrrr* da muß man erst mal drauf kommen!
Verbindung klappt, dafür hängt die IMU2 Kalibrierung nach dem ersten Wert. Mir fällt dabei auf, daß als erstes IMMER der ‚+Z‘ Wert ausgelesen wird, egal wie ich die IMU halte.
Ich habe meinen Kalibrierwürfel während des Meßvorgangs um 90° gekippt – da müßte die Kalibrierung eigentlich auf eine andere Achse umspringen, oder?
@admin: zeig mir bitte nochmal wo ich mir ein merkbares Paßwort einrichten kann!6. September 2015 um 11:48 Uhr #1101TeilnehmerEdit: nach einer Stunde ergebnislosem Rumfummeln habe ich das Board resettet, Firmware neu geflasht und sofort mit (intaktem) USB Kabel Kamera IMU kalibriert. Wunder über Wunder: auf einmal ging was und niemand wußte warum ;o)))
Vorher habe ich erst mal ’nen Stecker fürs Kalibrieren angelötet; keine Lust jedesmal Kabel an- und wieder abzulöten.
Ich irre mich weiter empor: mal schaun ob IMU 2 auch tut. Zum weiteren Ablauf: beim Austarieren des gesamten Gimbals muß die Mobius zwingend drin sein, richtig?
Hat jemand einen Link der beschreibt wie ich meine DX6i verbinde?
6. September 2015 um 12:13 Uhr #1102EagleEiAdministratorJa, die Mobius gehört zum Gesamtsystem und somit relevant für die Einstellung der PID-Werte und natürlich der Balance!
Dein Passwort kannst du ändern in dem du oben rechts auf deinen Account klickst und weiter unten in deinen Einstellungen dein neues Passwort änderst.
Weiterhin viel Erfolg und zeig mal ein Bild von deinem Aufbau!
Attachments:
You must be logged in to view attached files.8. September 2015 um 19:43 Uhr #1104TeilnehmerBeim aktivieren der Motoren passieren bei mir lustige Dinge: der Pitchmotor dreht die Kamerahalterung ständig. Zwar langsam aber immer in einer Richtung. Irgendwann hatte ich Schiß die Kabel zu schlachten und habe Pitch wieder disabled. Auf der Yaw-Achse Ähnliches: sie geht voll auf Anschlag. Ich vermute ich habe x,y,z-Achse falsch zugeordnet.
Fragen:
– was muß gewählt werden um die Motoren zu aktivieren: ’startup pos‘ , ‚level‘ oder ’normal‘ ?
– woran erkennt man bei Bord und IMU 2 ‚oben‘ (+Z) und vorn (+x)Mein Board hängt kopfunter, aber es ändert sich an den ausgelesenen Achsen nichts, wenn ich ‚z points downward‘ wähle.
8. September 2015 um 20:25 Uhr #1105EagleEiAdministratorIch bin mir sicher dass bei dir der Sensor an der Kamerawippe und evtl, auch der Board Sensor auf dem Controller noch nicht passen.
OK, dann zunächst die Grundlagen:
Auf diesem Bild siehst du den Sensor mit seinem Punkt weißen Punkt: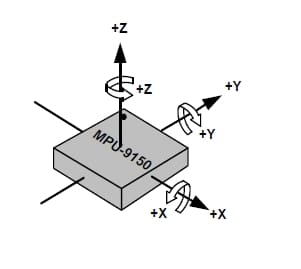
Dieser Punkt besagt wie die Achsen X,Y und Z im Raum liegen. Ist dein Controller so eingebaut, dass der Punkt zb. nach unten rechts zeigt, so bedeutet es Z schaut nach unten und X nach links und Y nach vorn.
Dementsprechend musst du in den Einstellungen die Position ändern.(Ich hab mir dieses Bild ausgedruckt und so vor/über mir positioniert wie der Sensor meiner Wippe verbaut ist und dann die Pfeile 1:1 übernommen! 😉 )
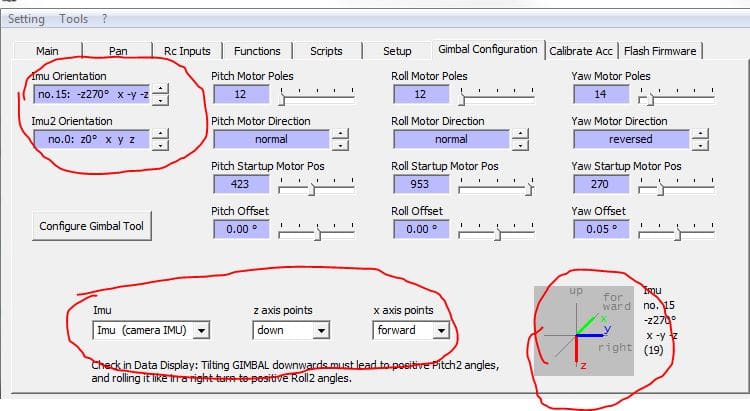
Wenn die beide Sensoren, 1.Kamera-Schwinge 2. Controller Board stimmen, kannst du mit den Motoren anfangen. zuerst alle Motoren deaktivieren und dann den Nick Motor einschalten, mit „normal“ dann sollte sich der Motor wenn alles passt leveln und dein Controller nach ca. 20Sek. kalibriert sein und sich mit „beep beep beep“ melden.
Dann folgt die Aktivierung des zweiten =ROLL, selbes Spiel, dann der dritte=YAW und fertig.Folgende Einstellungen auch beachten:
Motor Poles, bei den Walkera Motoren= 12
UND die PIDs in etwa so: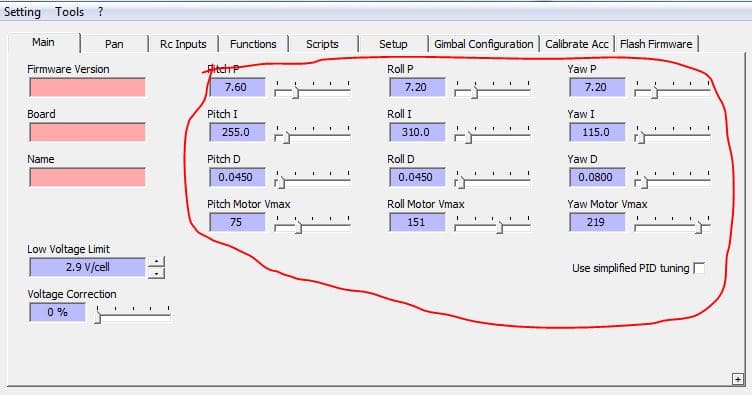
Nur Geduld, das wird schon klappen, …. das dauert immer ein bisschen bis alles passt! 😉
Hier noch den Link zu OlliW tolles WIKI und alles super beschrieben
http://www.olliw.eu/storm32bgc-wiki/Manuals_and_Tutorials8. September 2015 um 21:05 Uhr #1109TeilnehmerDas macht sie wenn nur Pitch aktiviert ist:
Pitch RotationUnd das macht sie auf Yaw:
YawDanke für die Screenshots. Ich werde meine Kalibrierung daraufhin ansehen
8. September 2015 um 21:17 Uhr #1110TeilnehmerUrgs: wer lesen kann ist im Vorteil. Jetzt habe ich auf der Kamera IMU erst mal die Achsbezeichnungen gesehen… ich hatte x und y Achse vertauscht…
Jetzt baue ich alles auseinander und suche auf dem StorM Board die Achsorientierung
8. September 2015 um 21:56 Uhr #1111EagleEiAdministratorFalls du noch nicht auseinandergebaut hast, lass es, schau mal auf dieses Bild, hier siehst du den PUNKT des Sensors,
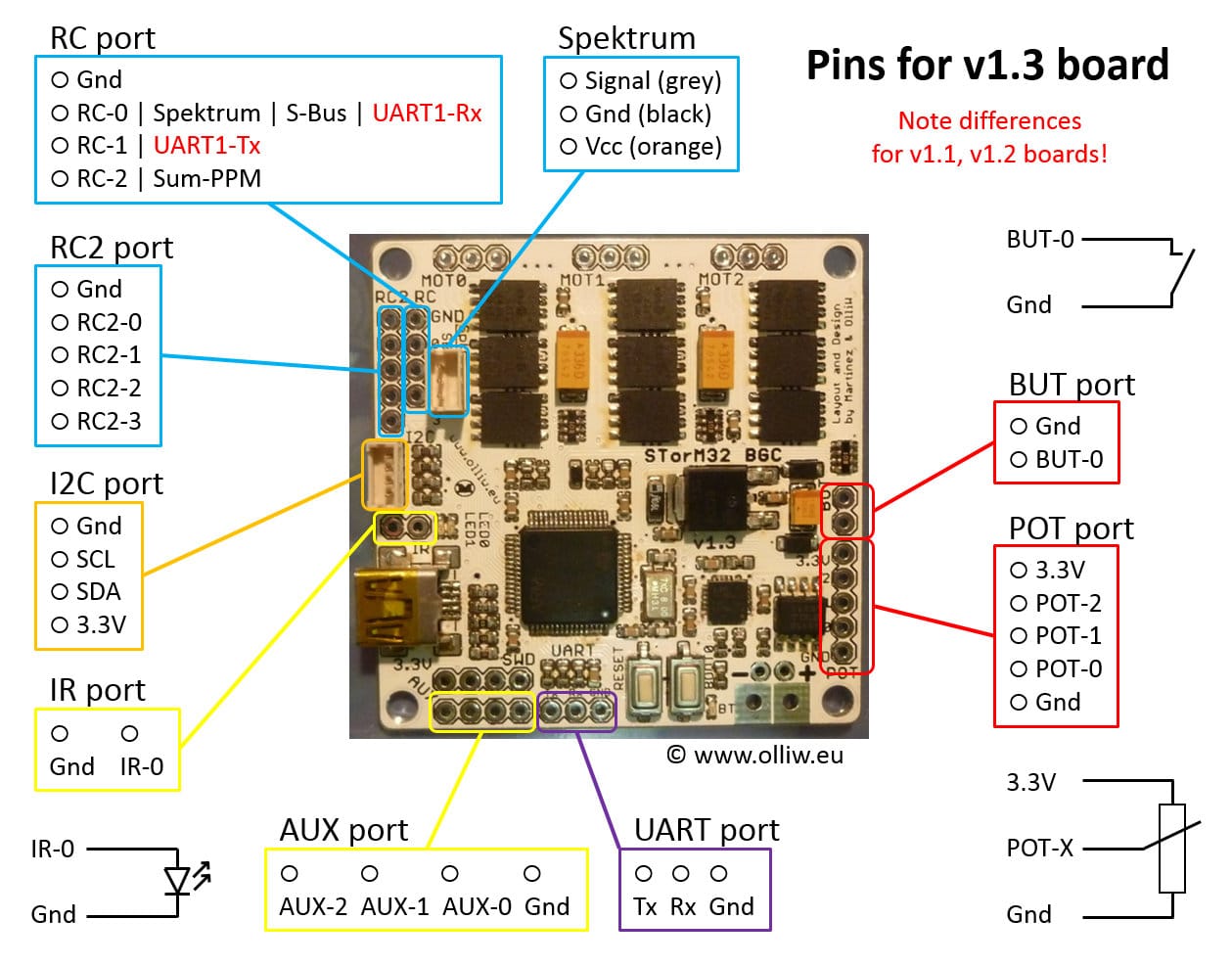
Der Punkt ist auf der Seite des Boot Tasters, rechts unten!
Aber es sieht doch schonmal recht gut aus, deine Pitch Achse = Z steht auf dem Kopf, vermutlich von deinem Controller.
Und auf Roll initialisiert das Board schon, das bedeutet es tut!
Dein Gimbal hängt noch etwas schräg, deine IMU 6 Punkt Kalibrierung scheint noch nicht genau zu sein27. September 2015 um 13:42 Uhr #1235TeilnehmerEs funzt! Kurzzeitig hatte ich wieder das defekte Kabel beim Wickel…
Aber dann: mit intaktem USB Kabel und richtiger Orientierung klappte es.Frage: Roll und Pitch Motor habe ich auf ’normal‘ gesetzt, ‚yaw‘ auf ‚level‘. Grund: als letzterer auf ’normal‘ gesetzt war, kamen die Bestätigungs-beeps und er versuchte wie wild zu drehen (ging natürlich wegen der Kabel nicht)
Ich hätte es gern, daß er einer yaw-Bewegung des Flugzeugs sanft/zeitverzögert folgt. Wer weiß welche settings dazu nötig sind?Jetzt such ich mir noch raus wie ich die Motoren mit meiner DX6i ansteuere.
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.