Open DIY Projects › Stuhlkreis › EagleEi Gimbal 3axis › STorM32 BGC Firmware, Grundeinstellungen und GUI
- Dieses Thema hat 66 Antworten sowie 10 Teilnehmer und wurde zuletzt vor 10 Jahren, 3 Monaten von
stephan75 aktualisiert.
-
AutorBeiträge
-
14. März 2015 um 23:02 Uhr #349
 EagleEiAdministrator
EagleEiAdministratorZunächst ist es wichtig das Board grundlegend richtig zu konfigurieren, an dieser Stelle möchte ich auf Olli´s Wiki verweisen, hier ist alles beschrieben:
http://www.olliw.eu/storm32bgc-wiki/Getting_StartedHier mal eine sehr verkürzte Anleitung in deutsch:
Für die Firmwareinstallation des Controllers benötigt man zunächst ein „Gerätchen“, ein USB/ TTL/FTDI Adapter.1. Diesen Adapter lässt man in Win insallieren, idealerweise automatisch, somit sollte an einem COM-Port nun dieses Gerät erkannt werden.
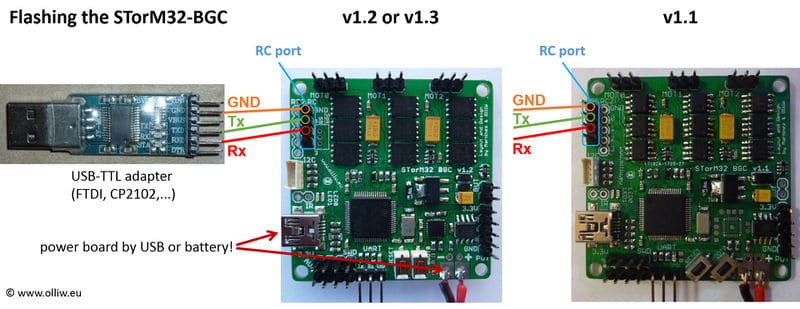
2. nun kann mit dem USB/TTL-Adapter das Storm32 Board verbinden, siehe hier:
3. Zunächst muss die GUI installiert werden und gestartet sein und der richtige COM-Port ausgewählt sein, ebenso die Firmware und der richtige COM-Port.
Die GUI gibt es hier: http://www.olliw.eu/2013/storm32bgc/#termsofusagegui4. Jetzt muss das Board in den Firmwware Empfangsmodus gesetzt werden, damit es mit einer Firmware beschrieben werden kann.
RESET und BOOT gedrückt halten und dann den BOOT-Taster los lassen, den REST noch kurz gedrückt halten, dann auch los lassen, nun sollte das Board bereit für die Firmware sein.5. nun in der GUI auf flash Firmware klicken, eine Dialogbox sollte sich öffnen und das Board mit der Firmware beschrieben werden.
6.Nach Abschluss der Firmware Installation, muss das Storm32 Board mit dem USB-TTL Adapter Port getrennt werden und neu via USB-Kabel mit dem PC direkt verbunden werden.
7. Die Installation kann ein paar Min dauern, im Anschluss sollte das Board mit einer neuen COM verbunden werden können.
8. Sobald Ihr die richtige COM-Verbindung gewählt habt, könnt Ihr den button „Get Status“ betätigen, nun sollte euer Board mit der GUI kommunizieren und die Text Box zeigt dies mit „get Status“ an.
Ab diesem Punkt beginnen wir nun mit den Grundeinstellungen auf unser EagleEi 3axis.
Wer sich an meinen Grundeinstellungen orientieren möchte, hier zu finden:
https://open-diy-projects.com/wp-content/uploads/2015/03/EagleEi-3Axis-V1.0.zip1. Die richtigen Motoren auswählen unter „Gimbal Configuration“ = bei allen drei Motoren für Pitch, Roll und Yaw wählen wir „14 Poles“ aus.
2. In diesem Fenster wählen wir auch die richtige „Imu Orientation“ aus, für die Imu1 = Kamera Sensor und Imu2 das STorM32 Board.
3. Im Anschluss sollten wir beide IMUs kalibrieren, unter „Calibrate ACC“
4. Die wichtigsten Einstellungen und vermutlich die sensibelsten Parameter = PIDs hier werden sicher noch bessere Einstellungen möglich sein, dennoch sind bei mir folgende Werte schon recht gut.
Pitch P=3,00 I=280 D=0,045 Vmax=93
Roll P=3,40 I=225 D=0,050 Vmax=108
Yaw P=4,60 I=85 D=0,055 Vmax=1265. nun schreiben wir diese Werte mal auf unser Board mithilfe „Write“
6. Unter „Setup“ aktivieren wir die Motoren nach der Reihe, beginnend mit Pitch, und übernehmen diese Auswahl mit „write“ wenn alle Einstellungen passen wird unsere Mobius in kürze Wagerecht ausgerichtet sein. Somit aktivieren wir den zweiten Motor Roll und zum Schluss den dritten Moor YAW.
Wenn nun alles richtig eingestellt war und das Gimbal in Ruhe initialisieren konnte, sollte das Board als kleines Dankeschön ein paar freundliche Beeps von sich geben und die Mobius wie gewünscht arbeiten! 😉
Im Anhang noch ein paar Screenshots mit den beschriebenen Grundeinstellungen.
Viel Erfolg!
Attachments:
You must be logged in to view attached files.26. März 2015 um 9:21 Uhr #722 miataModerator
miataModeratorSoftware – für Dummies (wie mich):
Meine Voraussetzungen: Laptop, Win xp (SP3).
Also so ganz einfach fand ichs nicht. Erst alles in Englisch, und dann für nen Neuling nicht ganz klar. Ich Berichte auch nur aus meiner *unqualifizierten* Sicht.
GUI= Programm mit dem man flashen (neueste Firmware aufspielen) und aber auch die Einstellwerte verändern kann.
Nun braucht man fürs flashen (das tut man sinnvollerweise zuerst, evtl ist das gekaufte Board sogar „leer“) eben die GUI, sowie die Software (Firmware), logo.
Ich dachte erst das das jeweils separat runterzuladen sei.
Ne, ist ein File in dem BEIDES drin ist.
Hier unter „o323BGC Firmware und o323BGCTool Dateien“ die oberste (neueste) nehmen.
Die „exe“ ist die GUI, die Firmware-Software hats in dem Ordner dafür (wählt man dann in der GUI an).Und nun verfährt man wies OlliW beschrieben hat.
http://www.olliw.eu/storm32bgc-wiki/Getting_StartedMan braucht aber noch zum flashen ein separates „Gerätchen“ wie man sieht. Ich hab das hier besorgt:
http://www.ebay.de/itm/311289478172Man benötigt auch ZWEI „USB zu MiniUSB-Kabel“ (eins fürs „Gerätchen“, eins fürs Board- hier nur wg Strom fürs Board)
Interessant ist, dass sich beide („Gerätchen“ und Board) beim anstecken an den PC selbst installieren. Einfach Software automatisch installieren lassen…Ich hab nun das Problem, dass ich beim flashen ne Felermeldung bekomm. „…dies ist keine Win32 Anwendung…“
Ich werds also mal auf meinen anderen, alten Laptop versuchen…
…to be continued…26. März 2015 um 19:33 Uhr #730EagleEiAdministratorHallo Micha,
das ist richtig, für die Firmwareinstallation des Controllers benötigt man zunächst dein „Gerätchen“, ein USB/ TTL/FTDI Adapter.Ich habe in „die-perfekten-grundeinstellungen“ soeben noch ein paar weitere Punkte beschrieben.
soeben https://open-diy-projects.com/topic/storm32-bgc-die-perfekten-grundeinstellungen/#post-349Wird bei dir dein USB-TTL-Adapter erkannt?
Zu deiner Fehlermeldung würde ich auch zunächst mal mit einem anderen 32Bit Rechner versuchen.26. März 2015 um 20:04 Uhr #731miataModeratorHi Benny,
leider auch auf meinem Uralt-Lappi mit auch XP exakt selber Fehler. Boah bis ich die Gurke erst mal soweit hatte…Nun gehn mir die Möglichkeiten und Ideen aus. Im Netz heißt es auch nur Viren oder alles mögliche.
In letzter Instanz muß ich mir erst Win7 holen?!
Jemand noch ne Idee?26. März 2015 um 21:57 Uhr #732EagleEiAdministratorHi Micha,
Keine sorge wir bekommen dein Board schon noch zum laufen, da bin ich mir sicher.
Ist dein USB-TTl adapter funktionsfähig an deinem Rechner installiert? Also wird unter Geräteeinstellungen dieser ohne Fehler an einem COM angezeigt?26. März 2015 um 22:15 Uhr #733miataModeratorJa. Das „Gerätchen“ wurde erkannt und Treiber erfolgreich installiert. Neuer Com-Port wird angezeigt.
Selbiges beim Board anstecken.
Die GUI startet das flashen ja auch. DOS Fenster geht auf, will anfangen zu flashen, da kommt direkt die Fehlermeldung.
„….bin/ST/STMFlashLoader/STMFlashLOaderOlliW.exe ist keine zulässige Win32 Anwendung“Hab schon Firewall und Virenscanner mal deaktiviert, bringt auch nix.
Ah… da hat einer selbiges Problem (bei den Kommentaren):
http://www.olliw.eu/2013/stm32-this-and-that/Oha, dann brauch ich wohl xp als 64bit Version…, oder gleich neueres… :-/
26. März 2015 um 23:14 Uhr #734EagleEiAdministratorNee, ich denke nicht dass es an deinem 32bit System liegt, das sollte egal sein ob 32oder 64bit. (Bei mir läuft es auf meinem Tablet auch!)
Also nochmal langsam step by step.
Also dein USB-TTL Adapter scheint richtig erkannt zu sein, sehr gut.nächster Schritt:
-Ist dein USB-TTL Adapter auch mit TX, RX, GND auf deinem Board mit RX-PORT: GND,0,1 verbunden?
– ist dein Bord mit einer Spannungsquelle verbunden, am besten via +/- PINS, einen 3S Akku und nicht das zweite USB Kabel.
(ich vermute mal, dass du Ausversehen die USB-Strom-Verbindung zu deinem Board als COM ausgewählt hattest.)
– dann den COM-Port von deinem USB-TTL-Adapter auswählen und nochmals den Flaschversuch starten.???
27. März 2015 um 8:00 Uhr #735miataModeratorIch habs auf OlliWs Seite so verstanden dass man das Board per 2. USB-Verbindung mit Strom versorgt. Gut, werde mal den Akku stattdessen dranmachen.
Mir ist noch aufgefallen dass der TTL-Adaper auf 3,3V gestellt ist. Da sollt ich sicher auf 5V schalten?!
Aber für mich ists unlogisch dass ne Win-Fehlermeldung kommt wenn er ein konnektion-Problem hat.
Btw: auch bei dem Billig-Gimbal bekam ich die GUI nicht zum laufen damals. Weiß aber den Fehler nimmer.
Ich versuch heut Abend Deinen Tipp.Soll mer mein Problemchen hier belassen oder besser woanders hin legen hier?
27. März 2015 um 8:33 Uhr #736miataModeratorAh, ich hab was gefunden… XP anscheinend problematisch… aber hier gibt’s ne Anleitung für diesen Fall.
http://www.olliw.eu/storm32bgc-wiki/How_to_flash_firmware
Sieht komplex aus, aber ich versuchs…28. März 2015 um 20:16 Uhr #760miataModeratorJUHEI- flashen ist geschafft mit dem oberen Link für Win xp.
So, nun startete ich die „normale“ GUI und folgte der Anleitung.
Doch nix tut sich..Meine Probleme:
Punkt 2: Imu Orientation – ich seh grade nicht wo ich kamera=Imu 1 usw angeben kann. Da stehen im Feld ja nur XYZ Daten..Punkt 3: Immus Kalibrieren. Wie? Nur grade halten dabei? 1 oder 6 Punkt?
Punkt 6: Motoren aktivieren. Enable all Motors? Auf Normal stellen? Immu Configuration off usw?
Btw: wenn man „write“ klickt… sollt man nicht auch das Häckchen setzen für store+wirte?
Gruß
Micha29. März 2015 um 10:58 Uhr #797EagleEiAdministratorzunächst, schön dass deine GUI mit deinem Controller spricht!
Zunächst, der SToRM32 Controller ist kein Plug & Play Controller, es sollte klar sein, dass man sich mit diesem DING etwas auseinander setzen kann und sollte.
Dafür belohnt der Controller und die GUI dies mit unzähligen Möglichkeiten die kein anderer Controller derzeit zulässt. -> Zb. das SToRM32 GPS Tracking uvm.Es würde den Rahmen hier sprengen jegliche Funktion von OLLis Controller hier zu beschreiben und auf jede Funktion und Einstellung ein zu gehen, hier macht es Sinn in Ollis schönes WIKI hin und wieder einen Blick rein zu werfen.
Dann hast du ja gleich mal einige Fragen…..
Ok, nun zu deinen Grundeinstellungen:
Als allererstes sollte die IMU richtig ausgerichtet und vor allem kalibriert werden.
Ich empfehle hierfür die 6punkt Kalibrierung, zuvor musst du deiner GUI mitteilen wie dein Sensor Ausgerichtet ist, dies siehst du mit den Pfeilen auf deinem Sensor und in der Software. X,Y,Z müssen passen.
Hier ein tolles Video zur 6 Punkt Kalibrierung, geht auch mit anderen Gegenständen, oder zu not einer ruhigen Hand!
Zum Thema Motoren, „scharf“ stellen, write und store…
zunächst jeden Motor einzeln, „normal“ dann auf write glicken, dann wird der Wert auf das Board übertragen. Jedes mal wenn etwas in der GUI geändert wird muss erneut WRITE gedrückt werden. wenn alles passt, STORE-WRITE, dann wird es auch im ROM auch gespeichert.Hier eine klasse vereinfachte Beschreibung:
http://www.olliw.eu/storm32bgc-wiki/Quick_Start_GuideWir können auch gerne heute Abend eine kleine Telefonische Einstellung angehen!?
Gruß Benny
30. März 2015 um 9:06 Uhr #829miataModeratorHURRAAA!
Es tut!
—————————————————————————–
Ich war zu blöde und hab beim anlöten der Motoren das Board gedreht, somit auch die Anschlüsse verwechselt.Kurzzusammenfassung wos bei mit hängte nochmal über alles:
Voraussetzungen Win xp.
Unter XP funktioniert mit der GUI das Firmware flashen nicht! Für das Setup dann aber tut die GUI unter xp.
Fürs flashen unter xp das hier verwenden:
http://www.olliw.eu/storm32bgc-wiki/How_to_flash_firmwareDann ists wichtig wierum genau die IMU (Sensor) eingebaut wird!
Im Prinzip egal, nur muß man dann in der GUI unter „Orientation Imu“ anders konfigurieren. Also ob +x oder -x, usw…. und was unten oder oben usw…
Link hier wie die Orientierung der IMU ist:
http://www.olliw.eu/storm32bgc-wiki/Manually_Setting_the_IMU_OrientationMan kann aber auch simpel Bennys Werte exakt so übernehmen, WENN man die selbe IMU, und diese aber auch genau so wie er einbaut. Hierfür wäre noch ein Detailbild der eingebauten IMU prima.
Ich hab alles mit write übertragen und meißt gleich Häkchen daneben gemacht für write+store. Dann bleiben die Daten auch dauerhaft drin.
6 Punkt Kalibrierung wie oben angegeben. In meinem Falle wäre hierfür ein zweites IMU-Kabel schön gewesen ums so zu machen wie in obigem Video.
Nun tuts, im Rohbau, und zwar ganz hervorragend! Jetzt wirds nur noch etwas schön gemacht.
Ich wünsche allen Nachbauern viel Erfolg, es lohnt sich!
14. April 2015 um 9:53 Uhr #930miataModeratorEinige Zeit ins Land gezogen. Mein erstes Vorhaben das Gimbal an einem Hexa-Arm zu hängen war nicht erfolgreich, daher wieder alles zurückbauen auf Montage unterhalb im Center.
Nun tun sich 2 Optimierungsmöglichkeiten auf:
1. die Hochachse wird bei stößen „orientierungslos“. Heißt sie dreht plötzlich in eine Richtung in die Anschläge (bis Kabel ziehen). Zurück in Position bringen verweigert es bzw bringt nichts. Erst abschalten, dann geht’s wieder.
2. und das wichtigere, es wackelt deutlich bei stärkeren Bewegungen (zb Wind). Ich vermute hauptsächlich um die Y-Achse und Hochachse. Ich vermute sowas wie „nachwackeln“, aber kein Aufschaukeln. Ich denke da muß ich mal an den Werten drehen. Jemand schon ne Idee was direkt Sinn macht oder soll ich mich einfach mal versuchen?
Ich versuch die Tage ein Video hochzuladen davon.14. April 2015 um 21:34 Uhr #933miataModeratorSo, grade vorhin mit den Werten „gespielt“. Das macht ja sogar Spaß und hervorragend einfach gemacht mit der Software. Man kann wirklich rumspielen und den Effekt beobachten. Vor allem die Hochachse ist wesentlich ruhiger geworden.
Ich muß aber trotzdem glaube noch die Aufhängung optimieren.
Aber es tut schon richtig gut. Und erstaunlich was das Board alles kann und wie sauber es sich konfigurieren lässt.Aber um beim Thema Strom-Board usw zu bleiben…
Einzige Frage und mir wichtige Frage:
Hab die Vmax-Werte angehoben.Board und Motoren werden nun doch warm.
Wie hoch darf ich die Vmax -Werte drehen ohne die Motoren oder die Treiber aufm Board zu verbrennen??
Gruß
Micha15. April 2015 um 7:21 Uhr #941EagleEiAdministratorMoin Micha,
Ich freu mich das dein Board mit dem Gimbal schonmal zusammenspielen, gut gemacht!Was Für PID Werte hast du den für dich gefunden?
Das mit dem Strom ist ein „heißes“ Thema, je höher desto wärmer und vorallem desto eher gibt es diverse Probleme und Effekte.
Das Überschwingen ist der 1.üble Effekt, je höher desto mehr wird der Motor unruhig. Das doofe daran der Stromwert zieht auch die PID Einstellungen mit in die Regelschleife und ist somit ein grundlegender Faktor der Einstellung.Ich versuche immer zuerst die untere Schwelle zu finden in dem ich dem ich die Spannung langsam erhöhe bis der Motor seine Aufgabe sauber umsetzt, keinesfalls mehr!
Wenn das Gimbal auf leichte Stöße die Haltekraft verliert erhöhe ich minimal.Ich habe mal getestet das Gimbal am Stück 2h laufen zu lassen umbzubsehen wie sich die Motoren erwärmen und ob es driftet. Beides war nicht der Fall. Nach 2h blieben die Motoren bei Handwarm.
Ich kann gerne mal in kürze meine Motorströme Messen und hier mitteilen.
Weiterhin gutes gelingen!
Gruß Benny -
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.