Verfasste Forenbeiträge
-
AutorBeiträge
-
tommy0o
TeilnehmerMahlzeit nochmal,
also da ich ja gar keine Ahnung habe und alles soweit endlich geklappt hat habe ich die Propeller dran gemacht und bin damit auf ein Feld.
Ein bisschen holprig geflogen und plötzlich bricht die Verbindung ab.
Der Copter schoss plötzlich mit hoher Umdrehung hoch in die Luft ca 200m oder so.
Und dann fiel er irgendwann einfach runter.
Zum Glück landete der Copter ungefähr 400m entfernt genau zwischen Autos und nicht auf einem Auto.
Und total verwundert war ich, dass nur ein Arm und ein Motor kaputt waren, also noch mehr Glück.Dann habe ich festgestellt, dass in dem Backup „WiFree-INAV_7.17.2016.12.24.txt“ der Failsafe im Stage2 auf „Land“ mit einer sehr hohen Drehzahl voreingestellt war und er genau deshalb so in die Luft schoss.
Ich hoffe niemand anderem der sich an das Projekt macht passiert das mal und ich würde entweder direkt „Drop“ einstellen.
Und wenn man sich dann noch ein wenig mehr eingelesen hat „Land“ vorsichtig Stück für Stück von einer sehr niedrigen Drehzahl rantasten, dass der Copter langsam runter geht.Es wäre vielleicht auch gut bei dem Download von „WiFree-INAV_7.17.2016.12.24.txt“ Failsafe Stage2 Drop voreingestellt zu haben, damit Unwissende wie ich nicht die selben Probleme bekommen.
Mein fertiger Copter (ohne Propeller)
Gruß tommy
Attachments:
You must be logged in to view attached files.TeilnehmerIch geh kaputt…
Ich habe jetzt RX und TX nochmal am FTDI getauscht so wie ich es vorher schon mal angeschlossen hatte und es hat funktioniert.Danke nochmal für die Hilfe wahrscheinlich werde ich eh nochmal Hilfe benötigen 😀
TeilnehmerDanke nochmal für die Rückmeldung war 2 Wochen im Urlaub und konnte deshalb nicht antworten.
Also ich habe mehrere Fotos und Screenshots.
Im ersten Screen habe ich den FTDI Treiber von dieser Seite (http://www.ftdichip.com/Drivers/VCP.htm) für Windows installiert.
In Zadig wird er weiterhin als FT232 USB UART angezeigt.
Im zweiten Screen sieht man, dass auch STM Flash Loader nichts damit anfangen kann.
Im vierten Screen sieht man, wie ich das Ganze angeschlossen habe und das die grüne LED am FC dauerhaft leuchtet.
Im vierten Screen sieht man das der FTDI auch als Converter in meinem GeräteManager erkannt wird.
Irgendwas mache ich hier doch falsch?
Ich habe echt keine Ahnung wie ich das flashen soll!?Danke schonmal wer mir helfen kann
Gruß PatrickAttachments:
You must be logged in to view attached files.TeilnehmerDanke nochmal,
egal was ich mache, keine Chance.
Ich habe einen neuen FTDI ich habe einen neuen CC3D von Conrad.
Mit deinem Treiber habe ich im GeräteManger den USB Converter versucht zu aktualisieren. Es kommt immer „Sie haben bereits den besten Treiber intalliert“ oder so.
Dann versuche ich mit dem Flash Loader Demonstrator da drauf zuzugreifen, funktioniert nicht immer einen Fehler („No response from the target, the Boot loader can not be started“, bla bla bla).
Ich habe es mit Windows 7, Linux probiert alles keinen Erfolg.
Etwas ist mir jedoch aufgefallen: In den Anleitungen ist in dem Mainport vom CC3D außen das Grüne Kabel und davor das Orange, bei mir ist außen Gelb und davor Grün und am FTDI ich in der Anleitung erst schwarz, dann 2 frei und dann grün dann orange! Bei mir müsste es dann ja schwarz, 2 frei, grün und dann gelb sein oder?
Habe ich aber beides schon probiert auch gewechselt! Egal was ich mache in Zadig steht immer FT232R anstatt STM32 Bootloader, bei beiden FTDI und bei beiden CC3D.
Kann mir vielleicht jemand irgendwie weiter helfen?Vielen Dank
tommyTeilnehmerMahlzeit,
nach vielem Hin und Her habe ich nun von einem CC3D auf einen Naze32 Afroflight Rev6 gewechselt.
Nun hat es endlich geklappt iNav 1.1 auf den FC zu flashen. Ich benutze auch wie empfohlen die iNav 1.0 GUI von Chrome.
Die App ist installiert und bekommt auch die Verbindung zum Raspberry ESC Kalibrierung erfolgreich durchgeführt die Motoren lassen sich über iNav ansprechen.
Nun mein letztes Problem, welches ich zu bewältigen habe:
Ich bekomme keine Befehle vom Raspberry in den FC rein. Wie kann ich das überhaupt sehen im iNav?
Also unter Receiver tut sich nichts wenn ich Bewegungen in der App mache.
Unter „Control Sticks“ passiert auch nichts ausser ich klicke auf „Enable Controls“ dann bewegen sich die farbigen Balken im Hintergrund aber die Motoren machen auch nichts.
Angeschlossen habe ich den Raspberry an der 4. Stelle direkt neben GND mit dem mittleren UART 1 RX auf dem FC siehe bild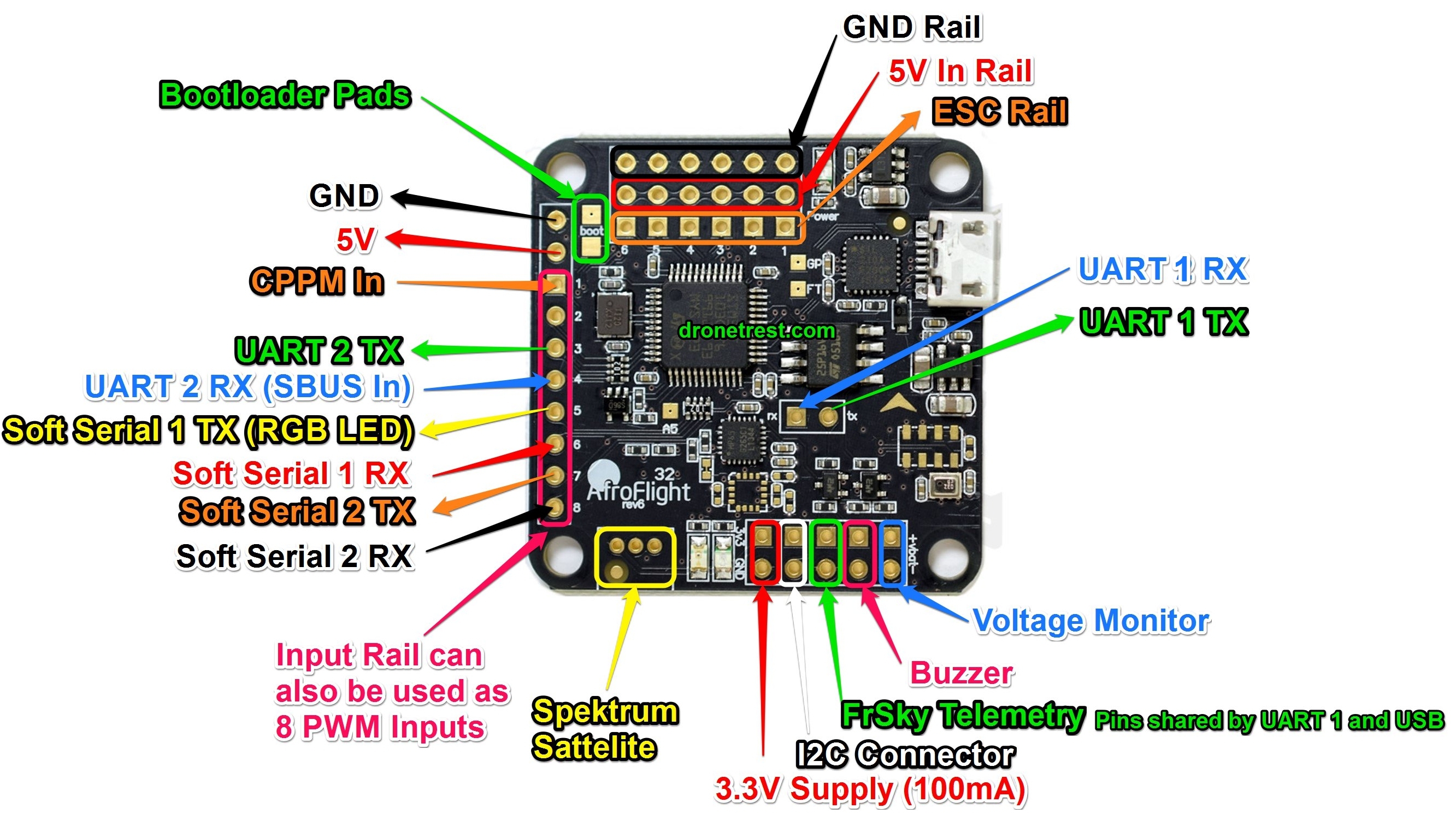
Ich wäre jemandem der mir helfen kann sehr dankbar.
Will endlich mal einen Testflug machen.LG tommy
TeilnehmerHallo Didzioneit
und danke für deine Antwort.
Zu Punkt 1:
Die Treiber sind doch automatisch installiert worden oder?
Also Windows erlennt es in meinem COM Port.
Auf meinem Chip steht: 1750-C, CN480661, FT232RL.
Woher bekomme ich dann den genauen Treiber? Habe auch schon versucht mit dem STM32 Flash Demo zu flshen, auch der wollte es nicht annehmen.
Zu Punkt 2:
Habe beides Probiert in dem Screen habe ich die Choose Firmware Local benutzt und die 1.6 aus dem Forum genommen. Habe es wie gesagt auch schon probiett mit der Auswahl des CC3D und Firmware 1.1 ging beides nicht.
Zu Punkt 3:
Ne meine LED leuchtet dauerhaft grün oder meinst du die vom FTDI?
4.:
Die Spannungsversorgung vom FC läuft über USB Kabel mit Adapter in die Steckdose.Habe es schon mot Win7 und Linux erfolglos probiert.
Habe mich jedoch in anderen Forum bisschen durchgelesen und habe nun den Jumper wieder weg gelötet und mit LibrePilot die Betaflight3.1.6.bin geflashed und dann über Chrome Betaflight gestartet.
Hat alles funktioniert 😅
Ich kann auch MSP in Betaflight auswählen und das ist doch erstmal das wichtigste um mit dem Pi zu kommunizieren oder?
Nur ich habe keine Ahnung wie ich Betaflight einstellen muss! Vielleicht kann mir da ja jemand helfen?Ich hatte gelesen, dass hier eine Alternative gesucht wurde zum flashen, wäre das nicht eine gute Alternative ohne FTDI ohne Löten einfach Betaflight über LibrePilot zu flashen und alles mit Betaflight zu machen?
Danke im vorraus
TeilnehmerHallo,
ich versuche auch einen WiFree Copter zu bauen jedoch komme ich mit dem Flashen nicht vorran.
Ich habe den Jumper gesetzt und einen FTDI Chip gekauft. Alles wie beschrieben miteinander verbunden.
Wenn ich in iNav auf Flashen gehe kommt die Fehlermeldung: „No response from the bootloader, programming: FAILED!“
–> Siehe Anhang
Dann möchte ich es mit Zadig probieren, jedoch steht bei mir nicht wie bei anderen „STM32 Bootloader“ sondern FT232R USB UART.
–> Siehe Anhang
Wie bekomme ich den FC zum Flashen?
Ist mein FTDI defekt?
Habe auch schon mal den FC ohne der Lötbrücke and LibrePilot angeschlossen. FC wird erkannt und liefert auch die Daten.Hoffe jemand kann mir weiter helfen 🙂
Vielen Dank im vorraus
Attachments:
You must be logged in to view attached files.TeilnehmerOh sorry!
Falscher link.
Dieser hier ist richtig:Vielen Dank
TeilnehmerHallo,
ich habe ein Problem das Kabel vom Flexiport an den Pi anzuschliessen.
Mein mitgeliefertes Kabel hat die Farben Blau, Geld, Rot und Schwarz jedoch aus der Zeichnung kommt kein rotes aus dem Flexiport, das Schwarze geht mit an die Verbindung vom Wandler zum Pi und ich habe keine Ahnung was mit Gelb und Blau passieren soll?
Habe ich das soweit richtig verstanden?
Wir haben diesen FLightController:Attachments:
You must be logged in to view attached files. -
AutorBeiträge
{kind=link}