Open DIY Projects › Stuhlkreis › WiFree Copter › Troubleshooting WiFree
- Dieses Thema hat 165 Antworten sowie 39 Teilnehmer und wurde zuletzt vor 7 Jahren, 5 Monaten von
1907 aktualisiert.
-
AutorBeiträge
-
1. Oktober 2017 um 22:17 Uhr #4669
s3v3n
TeilnehmerMein Problem habe ich nach ein wenig Probieren doch noch selbst lösen können. Man muss im INAV unter „Receiver“ die Channel Map auf „JR / Spektrum / Futaba“ umstellen und dann auf speichern gehen.
4. Oktober 2017 um 16:28 Uhr #4670Jacko
TeilnehmerHallo, wir sind es noch einmal. Haben nun ersten Testflug erfolgreich überstanden. Unser größtes und wohl vorerst letztes Problem ist die Latenz. Wenn man nun auf dem Android Gerät z.B. den Throttle Regler auf mittleren Schub schiebt, führt die Drohne es ca. erst nach 2 Sekunden aus! Die Verzögerung beträgt also unfliegbare 2 Sekunden 🙁 hat hier jemand eine Ahnung woran dies liegen könnte?
(P.S. Wir benutzen ein schon älteres Tablet, da die App kein Android 7 unterstützt.
Könnte es an der Geschwindigkeit des Gerätes liegen? Was benutzt ihr so und wie groß ist die Latenz bei euch?)Danke schon einmal, eure Technik-AG Jungs
15. Oktober 2017 um 10:11 Uhr #4673 EagleEiAdministrator
EagleEiAdministratorWir haben nun eine neue APP-Version-1.3 welche auch Android 7 Geräte unterstützt!
Hier zu finden: https://open-diy-projects.com/topic/die-android-app/#post-3117Bitte testen und berichten!
17. Oktober 2017 um 14:57 Uhr #4674Malte
TeilnehmerHallo,
Ich habe mir die neue Version von der App Gedownloadet und die App wird leider immer noch automatisch beendet wenn ich sie starte.(Android 7.0)
Wüsste jemand woran das liegen könnte?18. Oktober 2017 um 23:20 Uhr #4675slaesche
TeilnehmerMoin!
Habe auf meinem Tablet (Samsung Galaxy Tab A 10.1, Android 7) die neue Software installiert. Die Warnmeldung beim Start ist weg und die Software funktioniert prima. Abgesehen von der Warnmeldung habe ich aber auch mit der alten Software keine Probleme.
Was mir aufgefallen ist: Die Verbindung klappt manchmal nicht, wenn die mobilen Daten (LTE) aktiviert sind. Abschalten hilft dann.
Nochmal vielen Dank für alles!
19. Oktober 2017 um 2:56 Uhr #4676luckybenni
ModeratorMoin Malte. Welches Handy / Tablet hast du konkret? Hast du evtl. Software drauf, die das Ausführen von „Nicht-Google Play Store“ Apps verhindert? Hast du die App bereits installiert bekommen? Das APK muss erst installiert werden, erst danach kann die App als WiFree gestartet werden. Standardmäßig erlaubt Android die Installation von Nicht-Google-Play-Store Apps nicht. Hast du evtl. ein gerootetes Android? Ohne weitere Infos kann das Troubleshooting nicht klappen.
Grüssle, Benni23. Oktober 2017 um 14:34 Uhr #4677TeilnehmerIch habe ein Samsung Galaxy s6.
Mit dem installieren der App habe ich keine Probleme und ich glaube nicht das etwas das ausführen von „Nicht-Google Play Store“ Apps verhindert ,da ich andere APK’s installieren und ausführen kann. Mein Handy ist eigentlich auch nicht gerootet.
Mein Problem ist ,dass immer wenn ich versuche die app zu starten eine Meldung erscheint,dass die App angehalten bzw. wiederholt beendet wird.
Grüße Malte15. November 2017 um 22:19 Uhr #4685Mickes
TeilnehmerHallo beisammen,
also ich bekomme die neue App Version auf meinem Samsung S8 nicht zum laufen. Wird sofort beendet bei Start (Android 7.0). Auf meinem Tablet, einem Wikipad mit kombiniertem Gamecontroller und einer Modifikation auf externe WLAN Antenne .-) das unter Android 4.2.2 läuft funktioniert die App. Mit dem Tablet fliege ich auch meine Parrot Bebop Kopter.
Mein größtes Problem ist immer noch die recht hohe Latenz bei der Steuerung. Der FC ist ein SPracing F3. Alles ist soweit funktionsfähig. Kamerabild, Steuerbefehle Failsave, alles funktioniert eigentlich wunderbar. Nur wenn ich mit dem Ding abhebe, ist es fast nicht möglich den Flieger auf Position zu halten. Steuerbefehle kommen nur mit relativ starker Verzögerung an. Das kann man auch bei angeschlossenem Rechner im Inav sehen. Ach ja, ich verwende einen Zero W mit dem letzten Image.
Bei den Videoeinstellungen habe ich alle Optionen durch. Mjpeg an – aus, Videostabi an oder aus.. Livebild an oder aus, das wird nicht wirklich besser.
Zu guter letzt habe ich noch versucht die Steuerung sensibler anzusprechen. Das herumgetatsche auf dem Display ist ja nicht unbedingt was für jeden 🙂
Dazu verwende ich einen geschlachteten handelsüblichen USB Joystick bei dem ich die Präzisionsknüppel einer alten 35Mhz Funke adaptiert habe. Die App spricht hervorragend auf mein Eingabegerät an, nur bis der Kopter das umsetzt, ist er oftmals schon wieder gecrasht. Letzter Start war dann nachdem ich allerdings etwas mit den Expo Einstellungen herumgespielt hatte, ein Raketenstart zur Hallendecke mit anschließendem Trümmerregen 🙁Mittlerweile ist schon wieder alles neu aufgebaut, aber das befriedigt mich nicht so besonders. Die Vermutung das die relativ niedrige Übertragungsrate von 9600 baud vom Raspi zum FC der Flaschenhals ist, hat mich dazu bewogen einen Blick auf die Software des Raspi zu werfen. Im Root/wifree Verzeichnis befinden sich ja die Scripte msp.rb und wifree-msp.rb. Dort habe ich nachdem ich mir Schreibrechte eingeräumt habe einfach mal die Baudraten von 9600 auf 19200 Baud geändert und gespeichert. Nach Neustart im Flieger habe ich dann im Inav die Einstellungen des Ports ebenfalls auf 19200 geändert. Was mich nun überrascht hat, die Änderungen zeigen keine Wirkung. Der Raspi kommuniziert immer noch nur über 9600 Baud.
Warum ist das so? Gibt es noch irgendwo eine Einstellung, die die Werte überschreibt? Meiner Kenntnis nach ist eine Kommunikation via RS232 bei unterschiedlich eingestellten Baudraten nicht möglich. Merkt man ja auch wenn man am FC einfach mal auf einen anderen Wert in den Ports umstellt. Da kommt dann nichts an. Aber der Raspi ignoriert die Einstellungen einfach?Gruß Mickes
18. Dezember 2017 um 23:18 Uhr #4698daktylion
TeilnehmerHallo zusammen, jetzt klinke ich mich auch mal wieder ein.
Ich habe jetzt fast ein Jahr (mit größeren Unterbrechungen) gekauft, gedruckt, gelötet (ich bin sehr schlecht) und installiert. Und jetzt hänge ich an einem Problem, das ich nicht recht kapiere:
der PI bootet ums Verrecken nicht.
Altes Image, neues Image, unterschiedliche Karten, neu formatiert: nix. Kein Mucks, die Kontrolleuchte rührt sich nicht und auch sonst nichts.
Ich habe die SD-Karten auch mal in einem Raspberry Pi Model B getestet: auch nix. Eine dort funktionierende Karte brachte aber den WiFree-Pi zum Booten, also an der Verkabelung (siehe Löten ;-)) liegt’s wahrscheinlich nicht. Außerdem düdelt der Flightcontroller beim Batterie-Anschließen munter vor sich hin (inklusive Lichtshow).
An den Pins des PI liegt wie gewünscht +5V an.
Könnte es am TX-AX-Kabel liegen? Das ist schon korrekt verbunden mit dem Kabel ganz außen am Flexiport des Flighcontrollers ( bei mir ist es gelb)?Hat jemand eine Idee?
Vielen Dank,
Dakytlion19. Dezember 2017 um 22:57 Uhr #4699TeilnehmerIch denke das die heruntergeladene Datei vom Image einen Schuss hat, oder es ist bei der Formatierung oder beim schreiben der Karte etwas faul.
Ich verwende den Win32 Disk Imager zum schreiben auf SD.
Du schreibst ja das eine funktionierende Karte am Wifree diesen zum booten bringt, da kann es eigentlich nicht sein, das an der Verkabelung etwas so faul ist das der nicht bootet.
Was für eine SD verwendest Du denn? Ich nehme gerne die 16Gb Karten von Sandisc. Damit hatte ich nie Probleme.Mach doch erst mal den Versuch ein normales Raspi Image auf der Karte deine Wahl zu installieren. Kannst das ja am Pi-B erst mal auf Funktion testen. Wenn der Wifree damit anspringt, hast wenigstens schon mal ein erfolgreichen workflow 🙂
Dann würde ich auch erst mal mit dem „nackten“ Zero ohne WLAN Dongle und Zusatzhardware probieren. Ich verwende den Zero-W, das ging auf anhieb ohne Probleme. Welchen Raspi verwendest Du im Wifree?
Gruß Mickes
9. Januar 2018 um 21:30 Uhr #4702tns
TeilnehmerMoin,
zunächst mal: super tolles Projekt, macht echt Spaß und ist toll um ins Copterbauen und -fliegen einzusteigen!
ich hab nun auch mal begonnen, einen Wifree zusammenzubauen.
Als Flightcontroller hab ich einen Naze32 Rev. 5 verwendet – im Motor-Testmodus funktioniert auch alles einwandfrei, und die Steuerbefehle aus der App kommen korrekt an (mit INav verifiziert).
ESCs sind auf Multishot eingestellt.
Sobald ich nun den Copter mit der App verbinde, fangen die Motoren an zu drehen – lt. INav mit nem Wert von 1000. Egal ob der Copter gearmed ist oder nicht. Die Drehzahl lässt sich dann auch problemlos erhöhen, aber geht eben nie auf 0.
Hatte jemand von Euch schonmal das Problem und kann mir nen Tip geben, was ich vielleicht falsch gemacht habe?
Danke schonmal & viele Grüße
tns13. März 2018 um 15:15 Uhr #4741shayaike
Teilnehmercan I use RPI3?
and how can I start hotspot with external wifi adapter?19. Juli 2018 um 17:35 Uhr #4869tommy0o
TeilnehmerMahlzeit,
nach vielem Hin und Her habe ich nun von einem CC3D auf einen Naze32 Afroflight Rev6 gewechselt.
Nun hat es endlich geklappt iNav 1.1 auf den FC zu flashen. Ich benutze auch wie empfohlen die iNav 1.0 GUI von Chrome.
Die App ist installiert und bekommt auch die Verbindung zum Raspberry ESC Kalibrierung erfolgreich durchgeführt die Motoren lassen sich über iNav ansprechen.
Nun mein letztes Problem, welches ich zu bewältigen habe:
Ich bekomme keine Befehle vom Raspberry in den FC rein. Wie kann ich das überhaupt sehen im iNav?
Also unter Receiver tut sich nichts wenn ich Bewegungen in der App mache.
Unter „Control Sticks“ passiert auch nichts ausser ich klicke auf „Enable Controls“ dann bewegen sich die farbigen Balken im Hintergrund aber die Motoren machen auch nichts.
Angeschlossen habe ich den Raspberry an der 4. Stelle direkt neben GND mit dem mittleren UART 1 RX auf dem FC siehe bild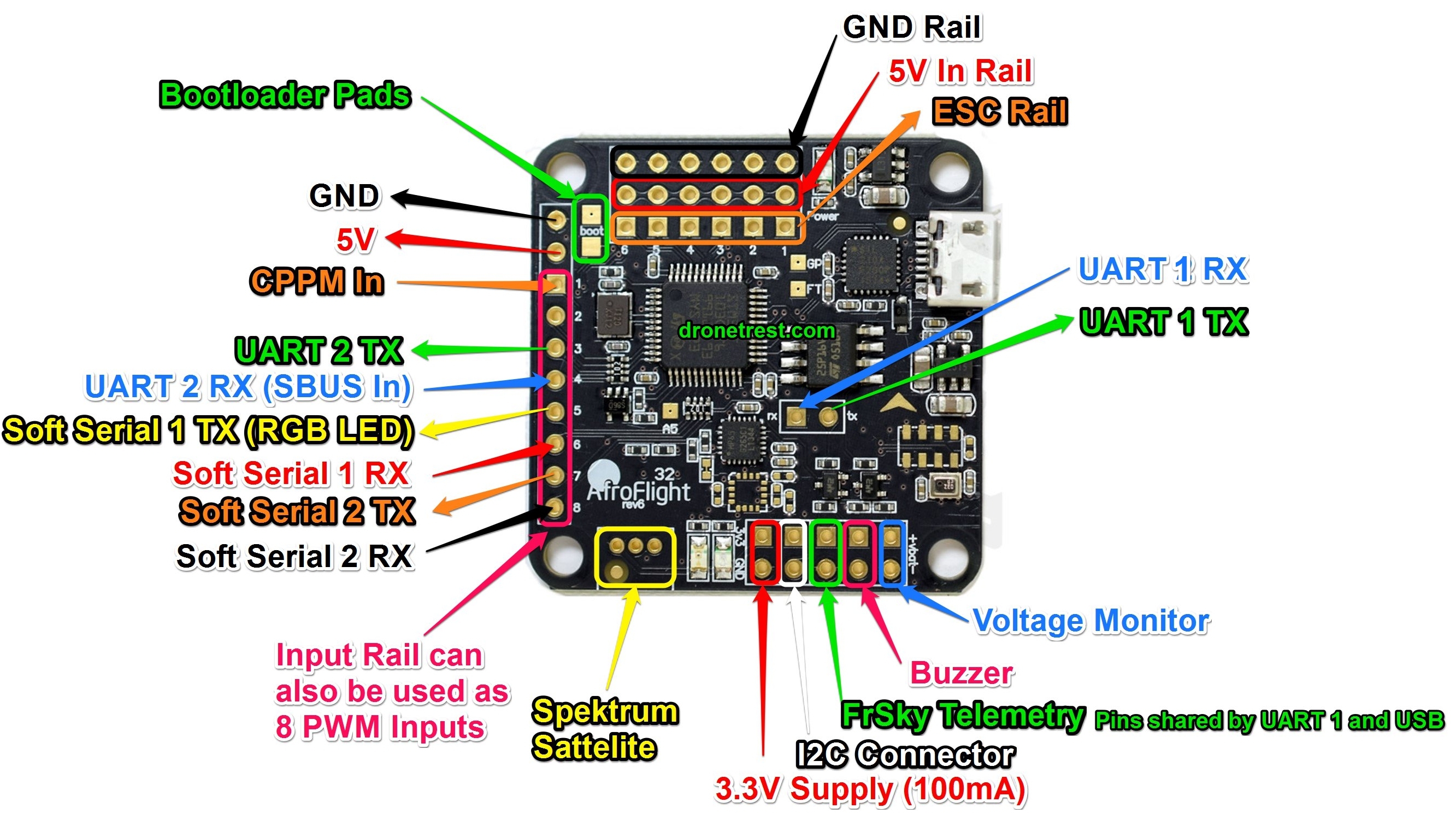
Ich wäre jemandem der mir helfen kann sehr dankbar.
Will endlich mal einen Testflug machen.LG tommy
1. September 2018 um 18:59 Uhr #4930JFM 01
TeilnehmerMoin Moin,
ich habe mir gerade den LogiLink WL0151A bestellt und vorerst mit dem Raspberry Pi 3B getestet. Leider bricht aber die WLAN Verbindung immer wieder ab. Ich probiere es in ein par tagen noch mal mit dem Zero.
Vielen Dank für Antworten13. Oktober 2018 um 10:10 Uhr #5033EagleEiAdministratorHallo Zusammen,
wir freuen uns sehr, dass unser WiFree nach zwei Jahren so oft und ausgiebig aufgebaut wurde und Zahlreiche Maker sich hier gefunden haben.Es freut uns, dass noch immer täglich weitere WiFress aufgebaut werden und viele von euch Ideen aber auch Fragen haben. Über 1000 WiFree-Copter wurden inzwischen rund um den Globus aufgebaut!
Damit es weiter geht, suchen wir Technikbegeisterte für unser Projektteam, die Lust an der aktiven Weiterentwicklung haben.
Viele Ideen, Konzepte sowie Prototypen liegen derzeit schon bereit, einige Versionen sind auch schon sehr weit, es fehlt oft nur noch an Grundeinstellungen im Flugkontroller sowie am Testfliegen und den Einstellungen!
Auch Versionen mit Omnibus Controller und GPS & Kompass stehen in den Startlöchern.
Uns fehlt es nur an der Zeit und daher würden wir gerne unser WiFree-Team weiter ausbauen.
WiFree-Maker, aufgepasst!! … Stellenausschreibung!
Hast du lust aktiv in unserem Projektteam mit zu arbeiten und bei der Weiterentwicklung als erster mit dabei zu sein? Prototypen zu erproben? Hast du schon Erfahrunegn mit Flugkontroller und Einstellungen und erfolgreich den WiFree aufgebaut?Dann melde dich über unser Kontaktformular!
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.