Open DIY Projects › Stuhlkreis › WiFree Copter › WiFree Flightcontroller und die Firmware
- Dieses Thema hat 229 Antworten sowie 43 Teilnehmer und wurde zuletzt vor vor 6 Jahren, 1 Monat von
Andi252 aktualisiert.
-
AutorBeiträge
-
15. Juli 2016 um 17:39 Uhr #3067
 EagleEiAdministrator
EagleEiAdministratorFlightcontroller
Der WiFree Copter ist designed für die 35mm x 35mm Flightcontroller, wie die Naze32, der Flip32 oder der CC3D.
Der hier beschriebene CC3D ist lediglich ein Serviervorschlag, da er alles bietet was wir mit dem WiFree benötigen. Das CC3D Layout und die Pins sind immer identisch, was man leider bei allen anderen nicht gerade behaupten kann.ACHTUNG: der CC3D besitzt keinen FTDI Chip, das bedeutet um die Firmware wie INAV ode andere zu installieren bedarf es noch einen USB-Seriel-FTDI Adapter und gegebenenfalls etwas Muse, je nach laune von Windoof! 😉 (…weiter unten genauer beschrieben)
Welchen Flightcontroller Ihr einsetzen möchtet bleibt euch überlassen, am besten ihr lest euch zunächst ein wenig in das Thema Flightcontroller ein.
Firmware:
In unserer Beschreibung setzen wir zunächst auf INAV diese hat von Haus aus schöne Einstellungsmöglichkeiten und ist in Sachen GPS und Failsafe bislang dem Cleanflight eine Nasenlänge vorraus. Gundsätzlich funktioniert hier auch „LibrePilot“ früher auch als „Open-Pilot“ bekannt.
Bei unseren ersen versuchen mit LibrePilot sind wir allerdings an der „Libre“ Installation gescheitert und die Erreichbarkeit von http://www.librepilot.org war nicht gegeben.
Beachtet bitte hier unsere —> ENTWICKLUNGSABTEILUNG <—ACHTUNG: Mit neuren Versionen gab es vermehrt Schwierigkeiten mit der Funktionalität mit dem MSP-Protokoll! Mit der INAV Version 1.0 und der Firmware 1.1 vom 13.Mai 2016 funktioniert es!
Die original 1.1 Firmware stellen wir im Anhang als Backup zur verfügung!Unser Mitglied Andreas hat uns die INAV Version 1.6 mit funktionsfähigem MSP-Protokoll compiliert, diese steht hier zum Download zur Verfügung: WiFree-INAV-1.6-mit-MSP
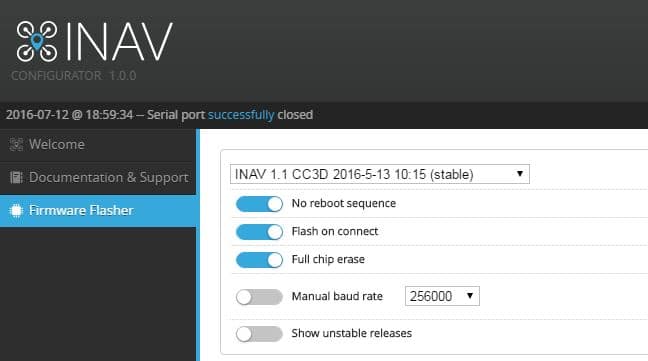
Hier die Einstellungen für das flashen von INAV
Und hier sämtliche Grundeinstellungen
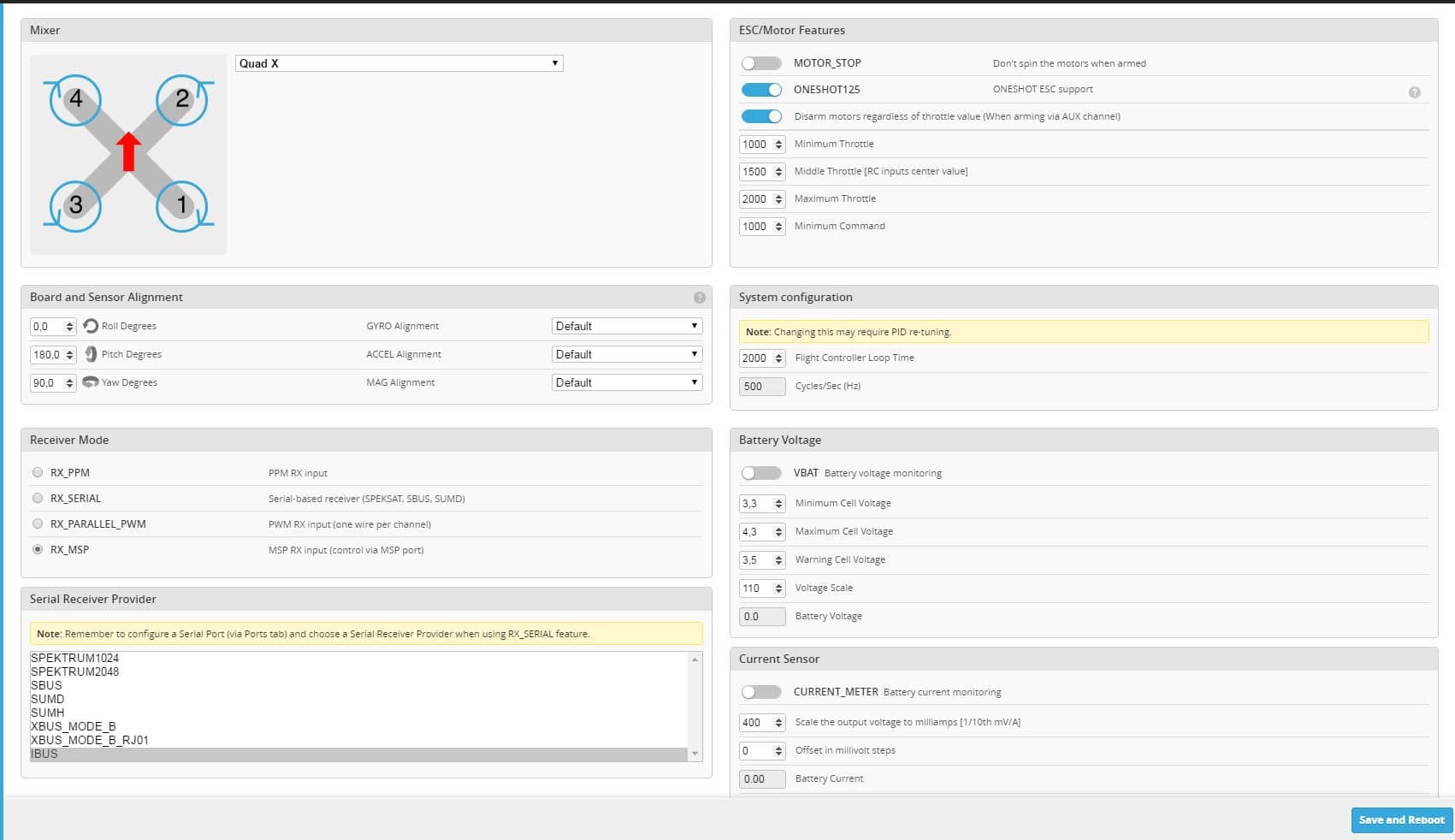

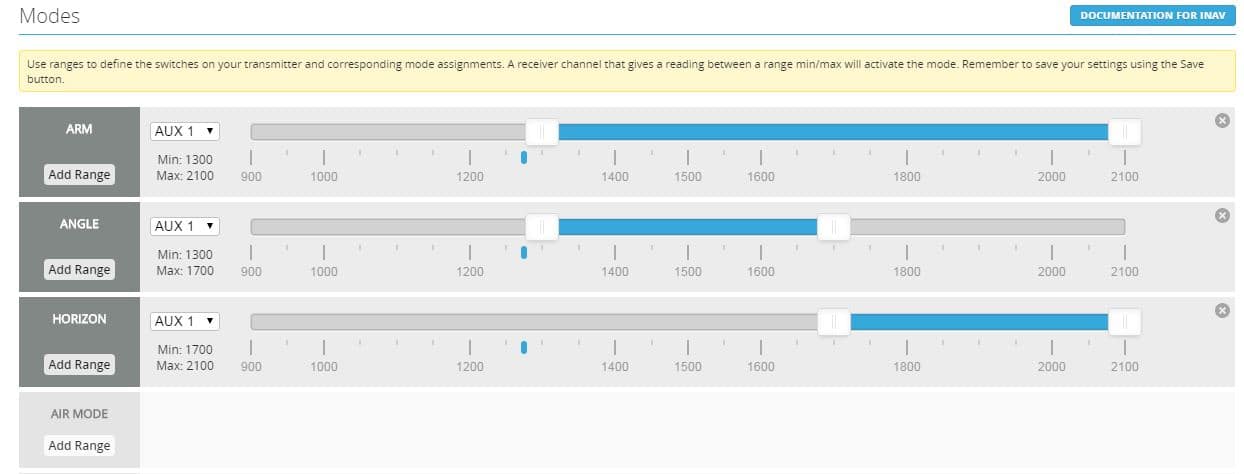
Im Anhang die INAV Einstellungen für den WiFree
*******************************************************************************
DER FTDI-SERIEL-USB-ADAPTER und das flashen des CC3D
Im Falle des CC3D Controllers benötigt ihr für das Firmware flashen von INAV oder CLEANFLIGHT einen USB-Seriel-FTDI-Adapter.
Diesen findet man schon für 3€ im Internet.Sieht in etwa so aus
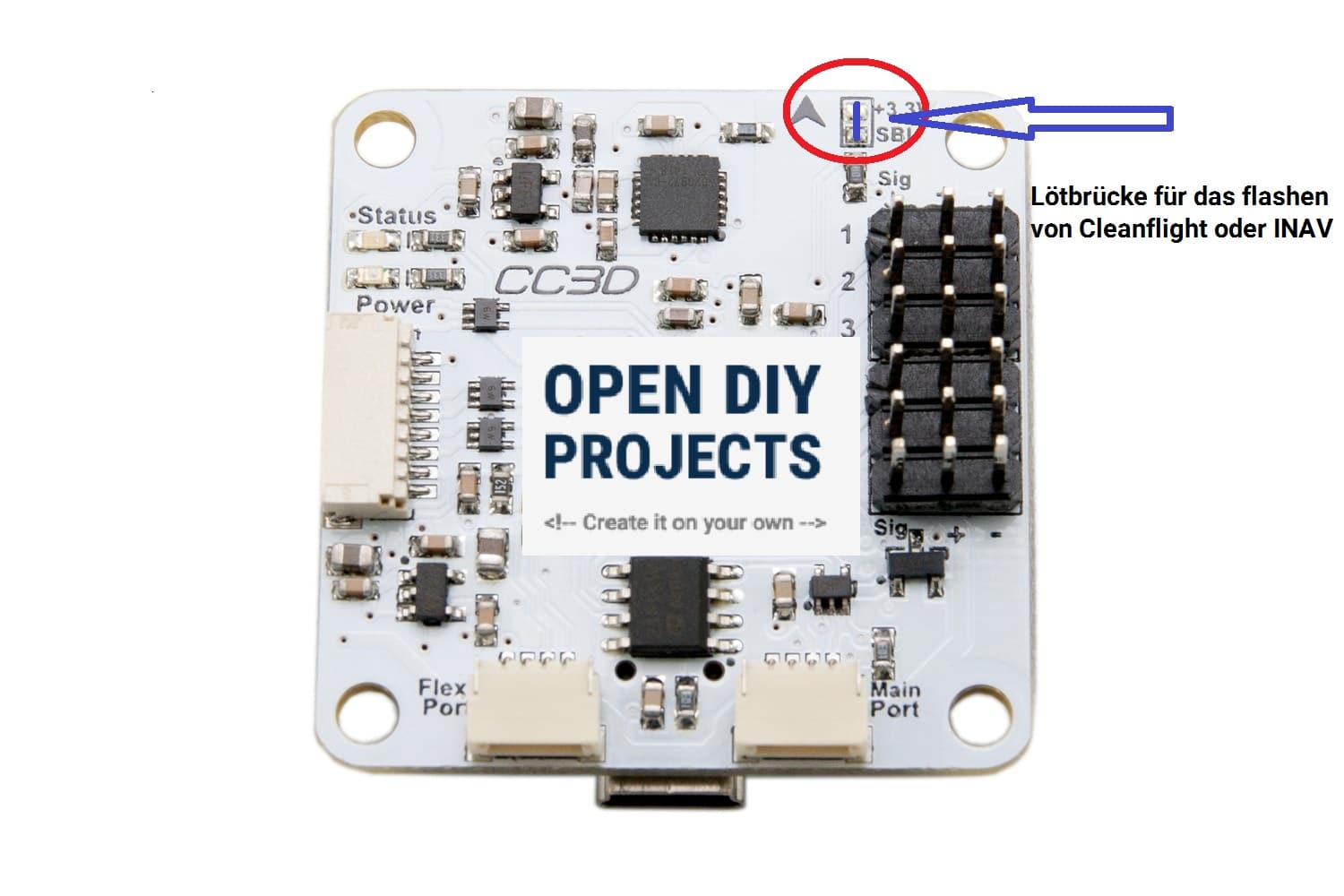
Zunächst muss die Lötbrücke für das flashen von INAV gesetzt werden
So wird der FTDI-Adapter mit dem CC3D verbunden
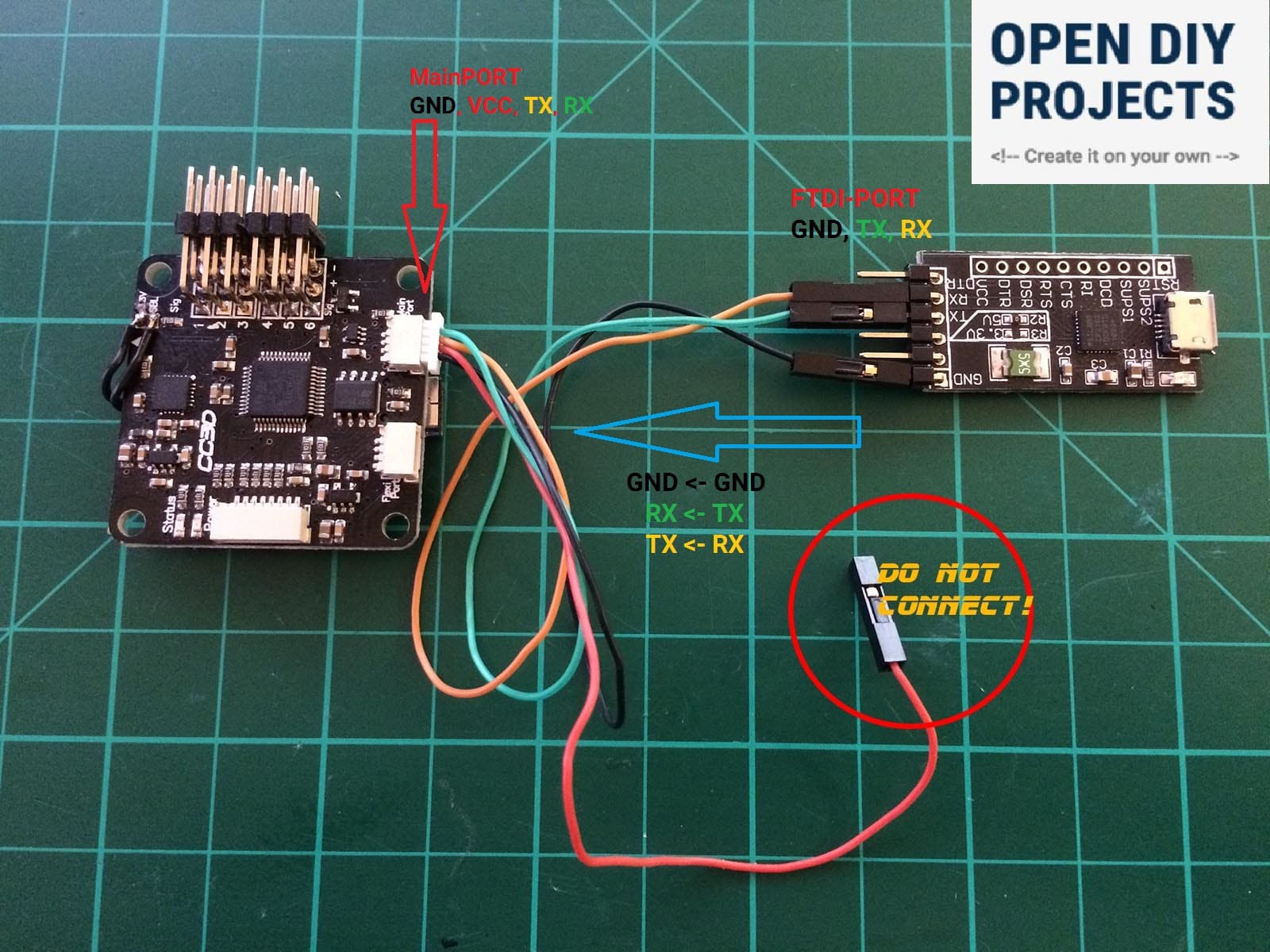
Hier auch eine ausführliche Beschreibung:
DAS FLASHEN VON NAZE32, FLIP32 usw. kann direkt über den USB-Port des Controllers erfolgen, da diese Flightcontroller einen onboard FTDI-CHIP besitzen!
*****************************************************
Hinzugefügt 5.9.2016Einstellungen in INAV und Cleanflight.
Ganz Wichtig, die Motorenanordnung!!
leider haben sich bei unseren unterschiedlichsten Copterplattformen keine Standards durchgesetzt, daher wird mit jeder neuen Controller-Technik eine andere Motorenanordnung neu erfunden.Im Cleanflight und im INAV sind die Motoren wie folgt angeordnet:
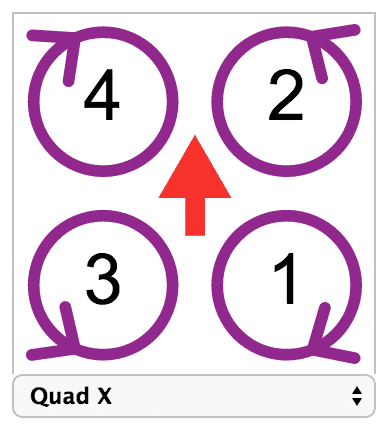
Genauso müssen auch die Motoren an die Augänge angeschlossen werden!
Dieses kann unter dem Reiter „Motor“ getestet werden!Die Ausrichtung bzw. die Einbaulage des Flightcontrollers!
wichtig ist es in der Software die Einbaulage des Flightcontrollers richtig ein zu stellen.
Wenn zb. der Controller nach unten verbaut ist, so müsst ihr in den Einstellungen der Software mitteilen „Pitch 180°“ somit weiss die Software dann auch was oben unten und seite ist und kann erst dann auch eure Motoren richtig ansteuern!ESC-KALIEBRIERUNG
Wenn Ihr eueren WiFree fertig aufgebaut habt, und euren CC3D oder FLip32 mit INAV oder Cleanflight installiert habt, solltet ihr als erstes eure ESCs „Motor-Regler“ kalibrieren.
Das geht bei recht einfach!
1. Propeller demontieren!!!
2. Ihr verbindet euren FlightController nur mit dem USB Port, um mit Cleanflight/INAV diesen am PC zu bedienen, keinen AKKU dazu stecken!
3. geht nun auf die Einstellungen „Motor“ aktiviert den Haken „Motor Test Mode“
4. zieht den Master Fader auf 100%
5. Ihr steckt nun den Akku an den WiFree
6 Ihr hört nun „didel di di“ 1Sek Pause dann „peep peep“
7. nun zieht ihr schnell den Fader wieder auf 0%
8. ihr hört „peep peep peep peep“
9 fertig! (Akku aus stecken, Flightcontroller von USB nehmen)Test:
1. USB wieder einstecken, sowie den Akku an den WiFree.
2. wieder aufd en Reiter „Motor“ und mit dem gesetzten „Haken“ im Anschluss den Master Fader einfach mal in verschiedenste Stellungen bewegen, Ihr solltet hören, dass die Motoren nun alle 100% den selben Sound von sich geben!Hier noch ein VIDEO:
mit viel blabla: https://www.youtube.com/watch?v=csCBMF8P3qg
Ebenso erfordert es auch die Sensoren des WiFrees zu kalibrieren!
Hierzu den WiFree Copter mit USB Verbindenund diesen Wagerecht auf den Tisch stellen.
Auf den ersten Reiter gehen und auf „calibration Accel“ klicken, 10Sekunden warten und es kommt die Meldung „calibration succesfull!“Hier eine gute Beschreibung für Cleanflight (im Grunde identisch zu INAV)
Attachments:
You must be logged in to view attached files.8. August 2016 um 22:30 Uhr #3204luckybenni
ModeratorMoin Benny,
wenn ich es richtig verstanden habe, benötigt man für das Flashen der neuesten Inav Firmware auf den CC3D mittlerweile einen UART Adapter. Wäre evtl. sinnvoll, dass gleich in der Materialliste zu erwähnen – denn sowas hat man für gewöhnlich nicht mal eben rumliegen – und wahrscheinlich darf man dafür auch ein paar Tage Lieferzeit aus dem Fernen Osten einplanen … Ich mach mich mal auf die Suche, wie ich an so ein Teil schnellstmöglich komme …
Grüssle, Benni11. August 2016 um 21:57 Uhr #3226 GeorgModerator
GeorgModeratorHabe den Naze32 rev5 afroflight im Wifree Copter verbaut.
Dieser geht, weil er die USB Buchse mittig hat.
Um mit INAV zu flashen muss ein Jumper gesetzt werden.
Als UART port muss UART2 genommen werden.
Dieser befindet sich auf der Unterseite an pin 4.Anleitung INAV Flashen beim Naze rev.5:
– Inav öffne , Firmware Flasher auswählen.
– Boot punkte brücken, und gleichzeitig USB anschließen.
– jetzt Bord (Naze) und version auswählen und Load firmware (online) wählen
– Boot punkte wieder brücken und flash firmware betätigen, dabei die Brücke geschlossen halten.
Zum Brücken kann man zwei steckpinns benutzen, und die mit einem Servokabel verbunden sind.
es funktioniert die Version 1.1 die funktion 1.4 nicht!!!!Attachments:
You must be logged in to view attached files.21. August 2016 um 15:46 Uhr #3282 bender2004Teilnehmer
bender2004TeilnehmerHallo an die Linux (Ubuntu)-User,
ein kleiner Tipp:
um eine Verbindung zu bekommen muss der Benutzer zur Gruppe dialout hinzugefügt werden
sudo usermod -aG dialout BENUTZERNAME
Gruß Jörg2. September 2016 um 9:58 Uhr #3316doing
TeilnehmerHallo EagleEi,
vielleicht sollte man auch darauf hinweisen, dass man die Lötbrücke zwischen dem SBL und dem 3.3V Pad wieder ENTFERNEN muss, wenn man (nach dem flashen der INAV Firmware) mit seinem WiFree Copter auch mal fliegen will. Ich habe mir dazu zwei Kabel an die Lötpads angeschlossen, die an einem 2Pin Male Header enden und einem Jumper gebrückt werden können. Wenn ich mit dem flashen dann mal fertig bin (ich warte auch noch auf meinen FTDI Adapter aus Chinesien) kann ich den Jumper wieder ziehen und gut ist.
Achja… was mache ich mit der ‚WiFree-INAV_7.17.2016.12.24.txt‘ Datei? Sehe ich das wenn ich den CC3D Flightcontroller endlich mal anschließen konnte?
Sonst steht dem Erstflug nichts mehr im Weg 🙂
Grüsse
Sebastian7. September 2016 um 14:20 Uhr #3341orlindi
TeilnehmerHallo Leute,
mal ne Frage…..kann man da auch einen Multiwii-Flightkontroller verwenden?
Oder ist es zwingend nötig, das es eine Naze32 oder eine CC3D ist.Die Multiwii kann ja auch das Summensignal eines Empfängers verarbeiten.
Und aus dem Raspberry kommt ja ein Summensignal raus….wenn ich das richtig verstanden habe…Grüße,
Markus7. September 2016 um 18:38 Uhr #3351GeorgModeratorFrame seitiges sollte die USB Buchse mittig sitzen.
Sonnst passt der Stecker nicht rein.
Technisch kann ich es nicht beantworten.8. September 2016 um 22:30 Uhr #3358EagleEiAdministratorEs können alle Flugcontroller eingesetzt werden, welche das MSP Protokoll empfangen können, mit MultiWI habe ich keine Erfahrung.
9. September 2016 um 21:37 Uhr #3366GeorgModeratorINAV instalieren
kurze Anleitung:
-Google Crome instalieren
-Inav downloaden
https://github.com/iNavFlight/inav-configurator
-entpacken
-in Crome auf entwicklereinstellungen das add on INAV hinzufügen
Inav ist ab jetzt in Crome zu finden unter Apps (oben links)Attachments:
You must be logged in to view attached files.10. September 2016 um 8:33 Uhr #3374EagleEiAdministratorDanke Georg für diese Erklärung!
11. Dezember 2016 um 13:01 Uhr #3617 kiamalexTeilnehmer
kiamalexTeilnehmerHallo Georg,
ich versuche gerade meinen Flightcontroller zu configurieren. Ich habe mir auch den AfroFlight Naze32 Rev5 gekauft. Auf diesen habe ich mit INAV die Firmware 1.4 NAZE ( siehe Anhang ) geflasht.
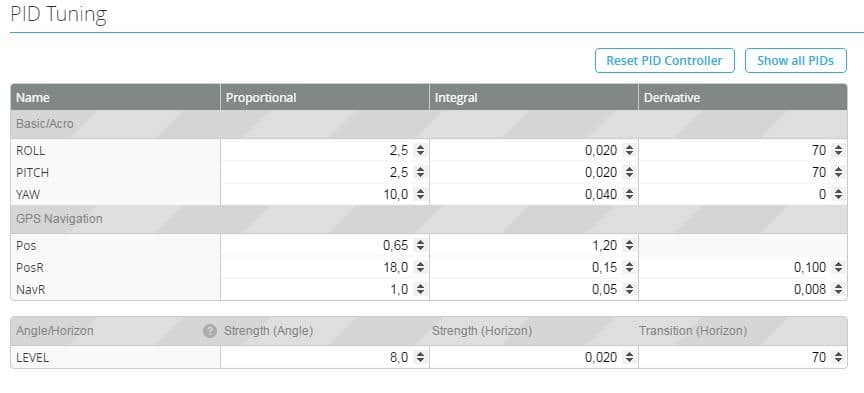
Beim Einstellen der Grundeinstellungen haben ich aber nun meine Probleme, da die von EagleEi eingestellten Bilder ganz anders aussehen. Die Werte der PID-Einstellungen lassen sich nicht mit Kommastellen einstellen, die ESC’s haben noch mehr Einstellungen usw…Kannst du mir bitte dabei weiterhelfen, da du den gleichen FC hast?
Kann man die Einstellung ex- und importieren?Was noch wichtig ist, dass ich ESC’s https://hobbyking.com/de_de/fvt-littlebee20a-pro.html einsetze. Ich weiß,dass ich auf OneShot125 stellen muß, aber die weiteren Werte sagen mir so schnell nichts.
Ich möchte nicht an alle Einstellungen blind rumstellen und unnötige Crash’s erleben.
Attachments:
You must be logged in to view attached files.11. Dezember 2016 um 22:13 Uhr #3619GeorgModeratorHallo kiamalex,
Kein problem, bekommst zwei Backup von mir.
Habe die großen Motoren verbaut (wegen failsafe einstellungen)
Beim Taranis backup sind die PID Werte etwas agiler gestellt, weil ich jetzt hauptsächlich mit Controler fliege.
Meiner fliegt so top….
einfach über restore laden.grüße
GeorgAttachments:
You must be logged in to view attached files.12. Dezember 2016 um 6:24 Uhr #3625kiamalexTeilnehmerHallo Georg,
vielen Dank für deine schnelle Antwort und Hilfe.
Werde die Konfiguration testen. Habe leider nur die kleinen Motoren ( 1806 2300KV ). Aber jetzt habe ich wenigstens eine Grundeinstellung, an welcher ich dann noch ein wenig feilen kann.
Jetzt muss ich nur noch alles montieren und kalibrieren. Ich hoffe das Wetter lässt vor Weihnachten noch einen Probeflug zu.Wenn alles funktioniert gibt’s dann auch noch ein Foto.
Grüße
Andreas12. Dezember 2016 um 21:26 Uhr #3626GeorgModeratorSchraub bitte die Failsafeeinstellungen hinunter….
sonnst fliegt er Dir eventuell weg sobald Du aus der Reichweite kommst, wäre doch schade…..
Diese müssen immer individuell auf das Gewicht des Copters eingestellt werden.
7 min. Flug, entsprechender Wind, machen einen guten Dauerlauf 🙂
(spreche leider aus Erfahrung ;-( )über Bilder und Anregungen freuen wir uns immer….
bitte berichten …..13. Dezember 2016 um 7:00 Uhr #3627kiamalexTeilnehmerHallo Georg,
vielen Dank für den Hinweis mit dem Failsafeeinstellungen.
Aber für eine Notlandung muß er erstmal fliegen 🙂Bericht folgt …..
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.