Open DIY Projects › Stuhlkreis › GlobeFlyer › Pixhawk, APM, Teranis, GPS, Verkabelung
- Dieses Thema hat 29 Antworten sowie 5 Teilnehmer und wurde zuletzt vor 9 Jahren, 9 Monaten von
 EagleEi aktualisiert.
EagleEi aktualisiert.
-
AutorBeiträge
-
27. Februar 2016 um 1:57 Uhr #2324
 GeorgModerator
GeorgModeratorHier findet der Austausch zu den Elektronischen komponennten statt:
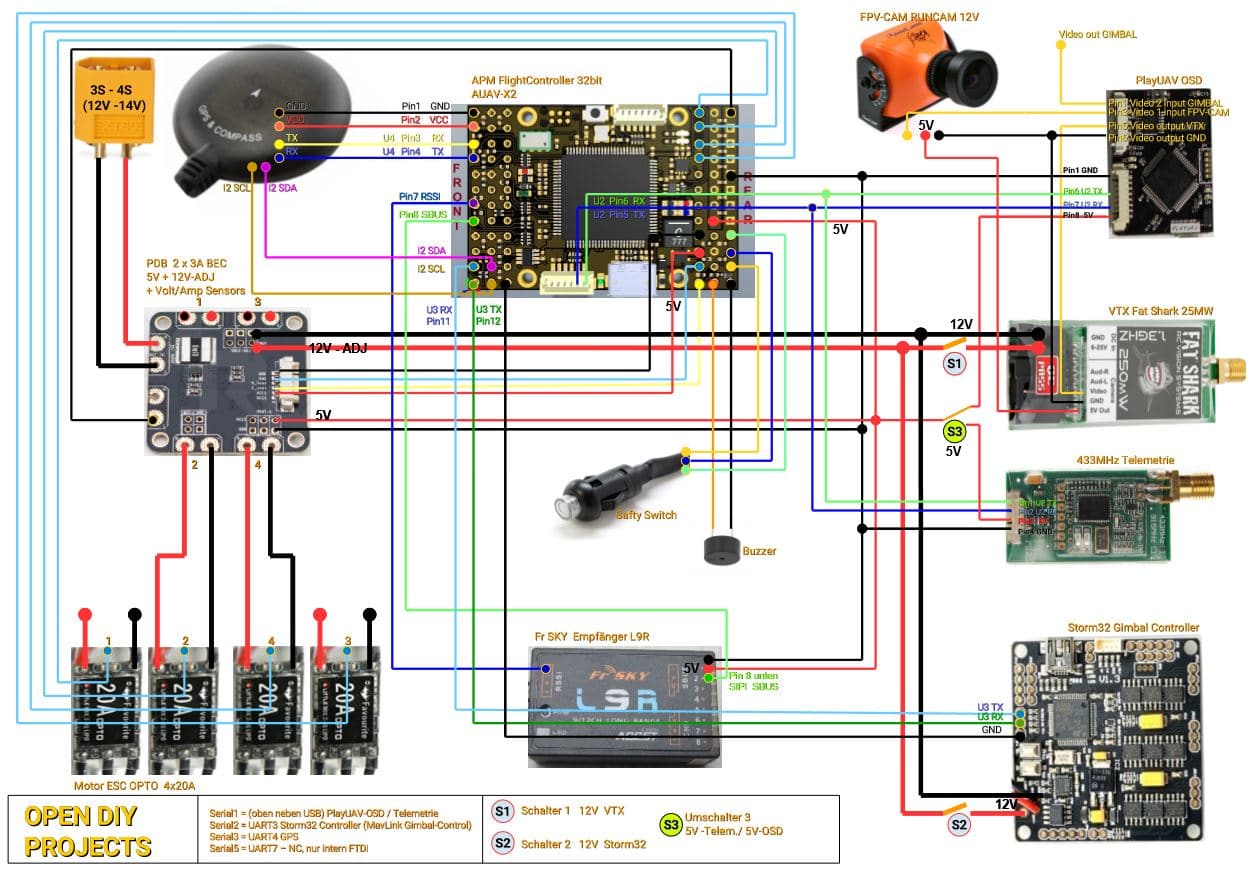
Erweiterung Schaltpläne für GlobeFlyer V2 mit AUAV-X2 und Strom32 Controller (9.10.2016 Benny)
Im Anhang hochauflösende PDF-Dateien
Attachments:
You must be logged in to view attached files.27. Februar 2016 um 2:03 Uhr #2325GeorgModeratorAls erstes gebe ich Euch einen intimen Einblick in meine Teranis.
Lade hier mal mein letztes Backup meiner Funke hoch. Vielleicht hilft das dem ein oder anderen bei den Einstellungen.
Habe bisher drei Flugmodelle gespeichert. Uns interresiert hier natürlich der Globeflyer. Dieser fliegt bisher noch mit einem APM mini.Attachments:
You must be logged in to view attached files.27. Februar 2016 um 11:51 Uhr #2328gustlp89
TeilnehmerHallo Georg,
ist cool, hab mir das gezogen und schon einmal im OpenTX Companion angeschaut.
Ist gerade alles etwas unverständliche, aber ich schau mir das parallel dann im Handbuch von Helle an.Hoffe das ich das Ganze dieses Wochenende noch kapiere.
Grüße Christian
27. Februar 2016 um 21:46 Uhr #2329GeorgModeratorJa, die Teranis kann viel, ist aber auch echt genial aufgebaut. Du kannst meine Werte aus dem GlobeFlyer einfach mit Makieren und Einfügen in Dein Modell laden.
Einfach beide Dateien in Companion laden (eventuell 2 mal öffnen, weis das nicht mehr so genau) und von einem Fenster in das andere Kopieren. So gehst Du die verschiedenen Einstellungsmenüs mal Durch und testest das ganze mal aus.
Hilfreiche Videolinks zur Teranis:
28. Februar 2016 um 12:39 Uhr #2330TeilnehmerHallo zusammen,
bin langsam etwas am verzweifeln.
Bekomme einfach die ESC nicht mehr kalibriert.Bei der Installation der Motoren und ESC ist das einwandfrei gegangen.
Nachdem ich jetzt hier alle 4 montiert habe verhält sich die Pixhawk total komisch.
Auch Euren TIP mit dem den Ausgabewerten des Throttle habe ich mir auf der Taranis diesen Kanal mit einem 3-Wegeschalter programmiert. Die Werte in den Klammern sind die angezeigten Werte im Missionplaner bei Radio Kalibrierung.
hinten 150% (982 -2006)
mitte 100% (982 – 2006)
vorne 50% (1238 – 1750)
wenn ich mit 50% kalibriere bekomme ich gar keine Kalibrierungsfreigabe mehr.
wenn ich 100% kalibriere bekomme ich von ESC nur längere Signale ausgegeben.
Nach mehrmaligen min max am Stick drehen sich dann die Motoren.
Die Kalibrierung bleibt aber nicht bestehen.Ich hab mal ein paar Bilder und ein Video erstellt.
Vielleicht kann mir jemand einen weiteren Tip geben.Grüße Christian
KalibrierungsvorgangAttachments:
You must be logged in to view attached files.28. Februar 2016 um 14:48 Uhr #2337GeorgModeratorHallo Christian,
Ich glaube das Problem liegt nicht an den ESC, sondern an der Funke im zusammenspiel mit der Pixhawk. Vermute das sich dein Pixhawk nicht „ARMED“ lässt.
Hierzu ist der häufigste Fehler ein nicht gut eingelernter Gasweg, (gasweg zu kurz). Schließ mal den PC mit an, und schau im Missionplanner ob da Armed steht wenn Du den linken Knüppel nach unten rechts hällst. Gründe zum nicht Armed sind: fehlendes GPS, Sensorfehler, Gasweg zu kurz, Trimm auf der Funke verstellt, und diverse weitere Fehler……
Erst wenn der Pixhawk alles für gut befindet lässt er sich aktivieren, also die Motoren anlaufen.5. März 2016 um 12:20 Uhr #2379TeilnehmerHallo zusammen,
ich verzweifle langsam an dieser sch…. Pixhawk!Die hupt und piepst nur noch die ganze Zeit.
Weder GPS noch Kompass lassen sich noch kalibrieren.Der Tip von Benny das Ganze über den Skip Radio im Freien zu machen, klappt auch nicht.
Von der Groundstation kann ich die Parameter laden aber vom 433Sender bekomme ich nichts angezeigt.
Sollte am Sender auch eine LED blinken/leuchten?
Also auch Sackgasse.
Seit Neuestem bekomme ich „keinen Rally point gefunden“ angezeigt.
Mit Akku ohne USB Kabel piepst das dumme Ding nur noch.
Ich habe jetzt Frostbeulen und Ärger mit meinen Nachbarn wegen dem gepiepse!Ich hau das Ding jetzt ins Eck und mache erst nächste Woche weiter!
Grüße Christian
5. März 2016 um 12:27 Uhr #2380TeilnehmerHier mal ein Screen shot vom SKIp Radio
Attachments:
You must be logged in to view attached files.5. März 2016 um 14:17 Uhr #2382TeilnehmerSodele,
jetzt habe ich’s doch noch hinbekommen.Die Pixhawk hatte sich wohl aufgehängt.
Habe im Netz gelesen:
soll sie zum reseten als Plane initialisieren und dann wieder als Copter.Und siehe da jetzt geht das alles ziemlich problemlos!
Sogar das Skip Radio funzt.
Leute mein Tag ist gerettet (-:
Grüße Christian
5. März 2016 um 14:40 Uhr #2383EagleEiAdministratorHallo Christian,
APM Copter ist sehr Anspruchsvoll und bietet neben unzähligen Möglichkeiten auch unzählige Fallstrecken. Ich hatte in den letzten Jahren auch schon sehr viele Stunden in Fehlersuche und mit Problemen gekämpft.
Man kann gut verstehen warum viele mit Fertig Copter daher kommen.
Wenn man jedoch die Hürden nach und nach überwunden hat ist die Freude an dem System jedoch enorm!Die meisten Fehler die man am Anfang macht sind im Regelfall im die gleichen.
Es ist wichtig dass man systematisch vor geht und Step by Step das System einrichtet.
Ich würde wie folgt vorgehen:1. Reset (Factory Reset) also zb. Die Groundstation installieren und dann wieder die Aktuelle Copter Firmware, derzeit 3.3.3 und das passende Copter Setup zb. X oder + auswählen.
2. Fernsteuerung einlernen/ Kalibrierung (Radio)
3. Acc Kalibrierung (Frame Ausrichtung)
4. ESC Einlernen
5. Kompass Kalibrierung ( sollte in Freien gemacht werden, idealerweise aud der Wiese, entfernt von Autos, Häuser, Stromleitungen…. Kann mit einem einfachen USB Verlängeungskabel gemacht werden.
6. Flightmodes einstellen, 1. Stab. 2. Althold wenn man möchte auch noch Loiter.
7. Wenn man hat Telemetrieverbindung (macht die Einstellungen umgänglicher)
Punkte wie Powermodul oder Sonderfunktionen sollten zunächst außen vor gelassen werden.
nun sollte man mit dem Motortest Tool im MP die Reihenfolge und Drehrichtung der Motoren prüfen, wenn dies Grundsätzlich alles passt würde ich einen Erstflug wagen und schauen ob er halbwegs stabil in der Luft steht und dEr Schwebeflug bei ca. 50% Gasstellung liegt.
Das wäre schon die Grundlage.
Als Hilfestellung gäbe es auch das Wizzard welches in dieser Reihenfolge vorgeht und einem Schritt für schritt hilft.
Viel Erfolg und bei Bedarf können wir uns auch gern Treffen und gemeinsam drüber schauen.
5. März 2016 um 19:08 Uhr #2387TeilnehmerHallo zusammen,
der Fehler lag mal wieder im Detail.
Seit dem ich den Reset der Pichawk gemacht habe ist alles im grünen Bereich.Das System lasst sich Armen und die Motoren laufen wie sie sollen.
Wenn das Wetter morgen mit spielt gehe ich Outdoor und kalibriere nochmals im Freien.
Dann hoffe ich auch gleich den Jungfernflug machen zu können.
Melde mich dann wieder.
Grüße Christian
7. März 2016 um 0:25 Uhr #2406GeorgModeratorHatte bei meinem APM mini auch zu Anfangs dubiose Fehler, und es half schmerzlicherweise nur ein „komplett reset“ (so wie Du das gemacht hast).
Leider besitze ich noch keinen Pixhawk, und kenn die einzelnen Neuheiten auch noch nicht. Also bist Du neben dem Benny hier wohl der zweite mit diesem Bord.
Freut mich umso mehr das er jetzt fliegt. Speicher aber zur Sicherheit Deine Einstellungen immer mal wieder ab. Ein Neustart kann immer wieder erforderlich sein. Spätestens nach einem Crash !11. März 2016 um 22:03 Uhr #2438aspunk
ModeratorHallo Miteinander,
könnte evtl. jemand der bereits denn Globeflyer in Betrieb hat. Diesen nochmals öffnen und die Verkabelung und die Position der einelnen Komponenten fotografieren? Und natürlich diese Bilder hier einstellen.
Verwendet Ihr ein PDB oder habt Ihr die Leitungen von den ESCs so aneinander gelötet?
Irgendwie bezweifle ich das ich alle von mir angedachte Komponenten in den Rahmen integrieren kann.Naja Bilder sagen einfach mehr.
Grüße Andreas
12. März 2016 um 9:07 Uhr #2439TeilnehmerHallo zusammen,
für mich ist ja genrerell das komplette Thema Kopter neuland.Nach dem ich aber jetzt den Globeflyer mechanisch aufgebaut habe und auch die Flugsteuerung funktioniert, würde ich gerne weitermachen in Richtung FPV
ich habe mich noch nie mit FPV Komponenten befasst.
In den letzten Tagen habe ich mir ein paar Videos im Netz angeschaut und denke das ich das Grundprinzip verstanden habe.Nur welche Komponenten im Detail machen den wirklich Sinn?
Könnetet ihr mir bitte in bißchen Hilfestellung geben bzgl der Einzelkomponenten.
Ob ich ein Brille oder doch einen Monitor nehmen sollte ist z.Bsp. so eine Frage.Wie sind da Eure Erfahrungen.
Danke
Grüße Christian12. März 2016 um 13:38 Uhr #2449EagleEiAdministratorGuten Tag Zusammen,
mein GlobeFlyer ist mit folgenden Komponenten bestückt:
AUAV-X2 ,L9R, Powermodul, Recon DC Wandler 5V, GPS, Telemetriemodul, PlayUAV-OSD, und diversem FPV-EquipmentAnbei ein Foto ohne Haube:
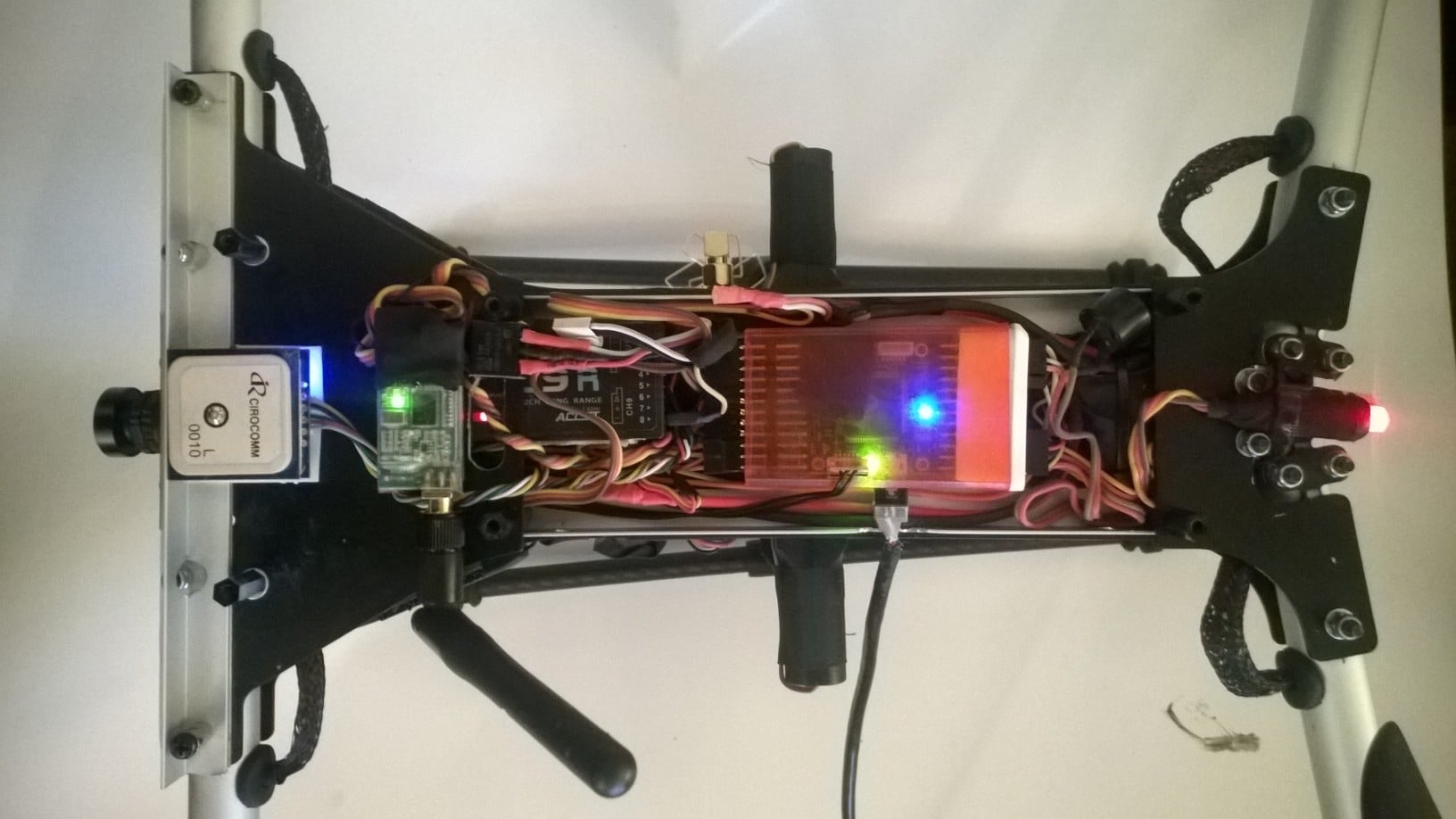
Ich denke es wäre interessant den Aufbau von Christian und BamBam und Georg ebenso unter die Lupe zu nehmen. Das könnte sicher dem ein oder anderen hierbei helfen!
Wie sieht denn dein GlobeFlyer und dein black manta copter mit deinem Gimbal derzeit aus, zeig doch auch mal ein paar Bilder, gerne such HIER
würden sich sicher einige über deinen Aufbau erfreuen. -
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.