Open DIY Projects › Stuhlkreis › EagleEi Gimbal 360° › Aufbauanleitung für das EagleEi 360° Gimbal
- Dieses Thema hat 18 Antworten sowie 6 Teilnehmer und wurde zuletzt vor vor 10 Jahren, 3 Monaten von
 EagleEi aktualisiert.
EagleEi aktualisiert.
-
AutorBeiträge
-
2. September 2015 um 23:09 Uhr #1082EagleEiAdministrator
Am Anfang war der Baum….

dann kam die Säge….

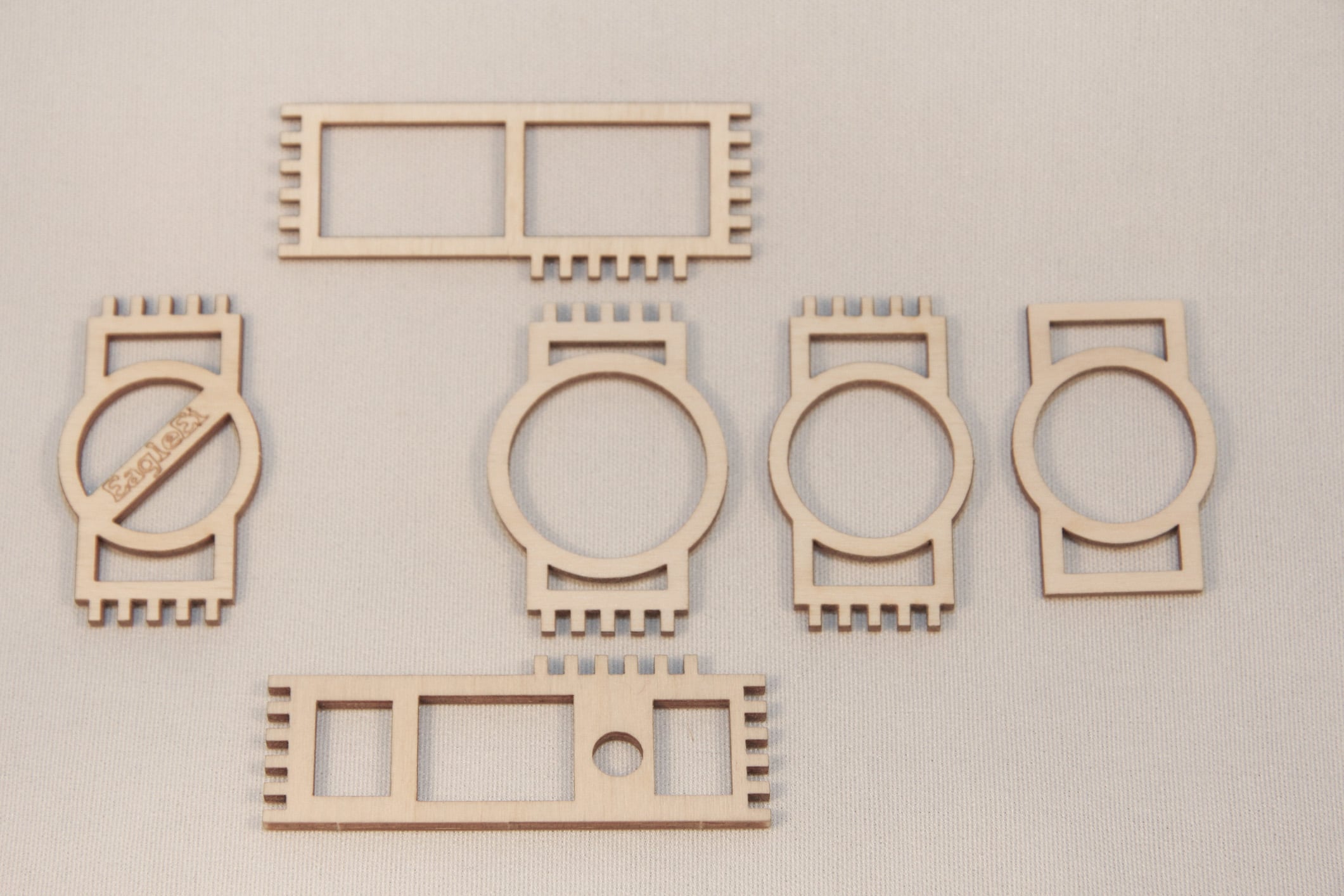
kurz darauf der EagleEi Bausatz:

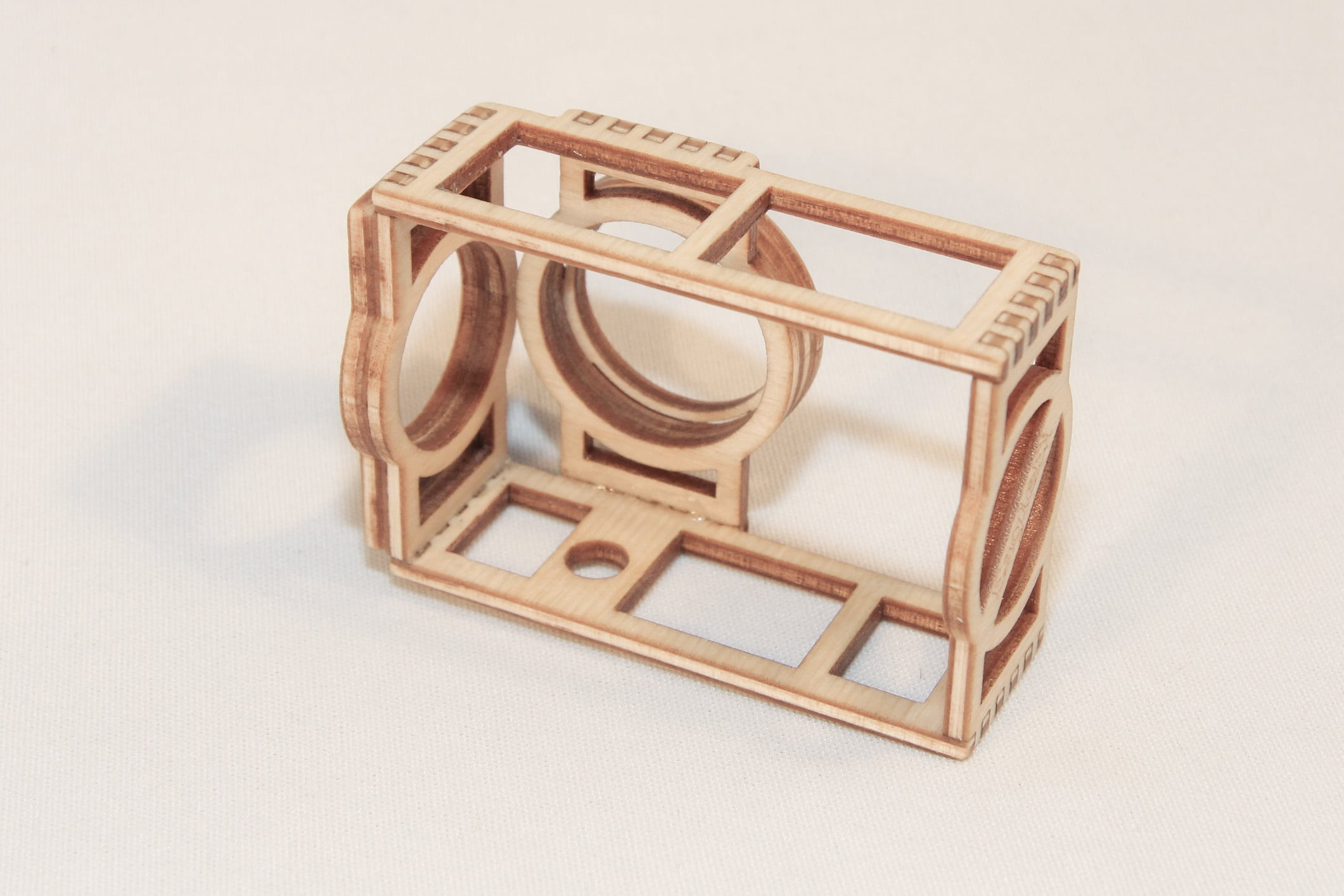
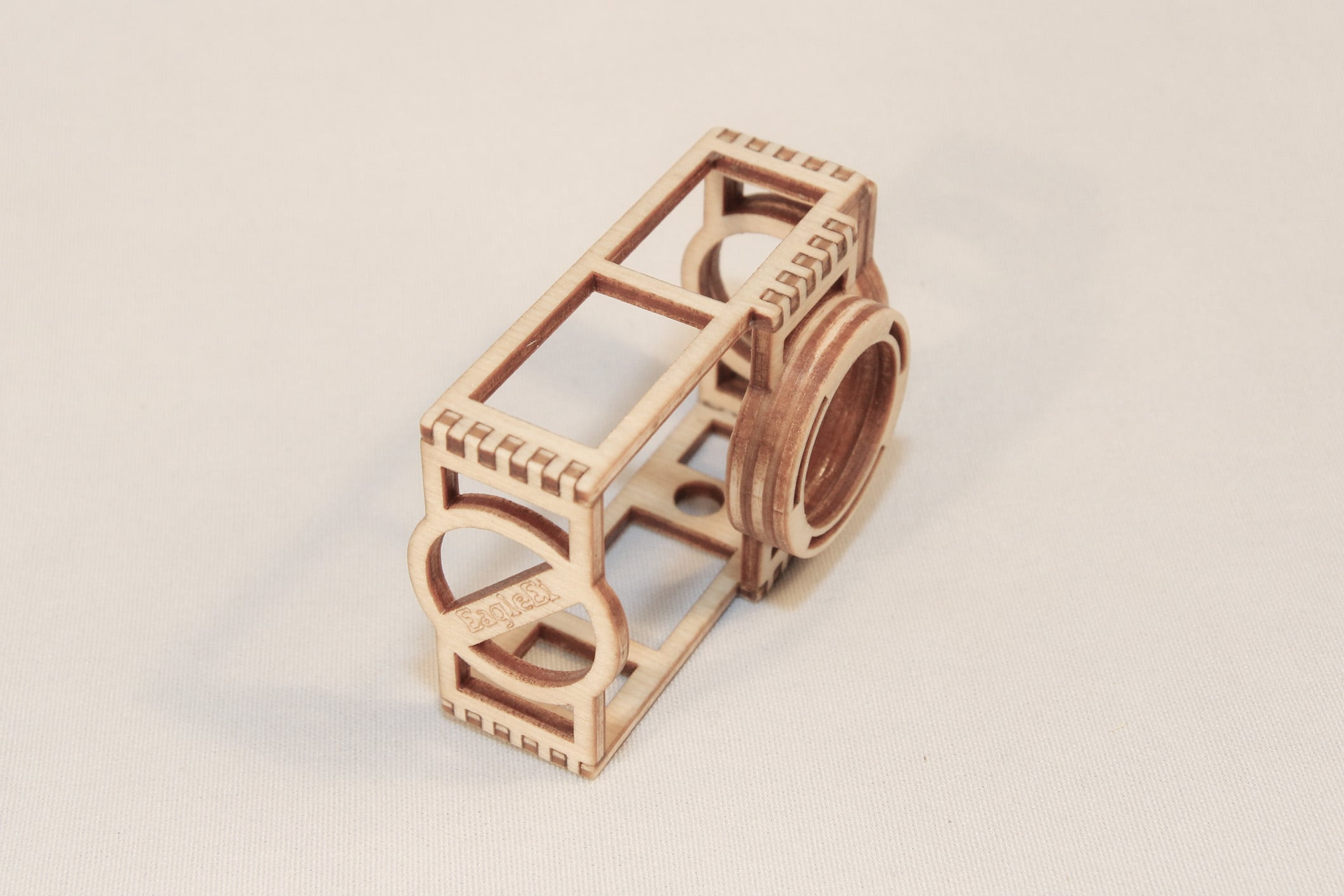
Hier mal ein paar erste Fotos des fertig aufgebauten Gimbals:
am Schluss etwas angeschliffen und geölt sieht das Gimbal richtig schön aus.


Hier ein kleine Hilfestellung zum Aufbau
Beginnen wir mit der Xiaomi Halterung an:
Die Xiaomi wird einfach von hinten eingeschoben und sollte schon etwas klemmen!
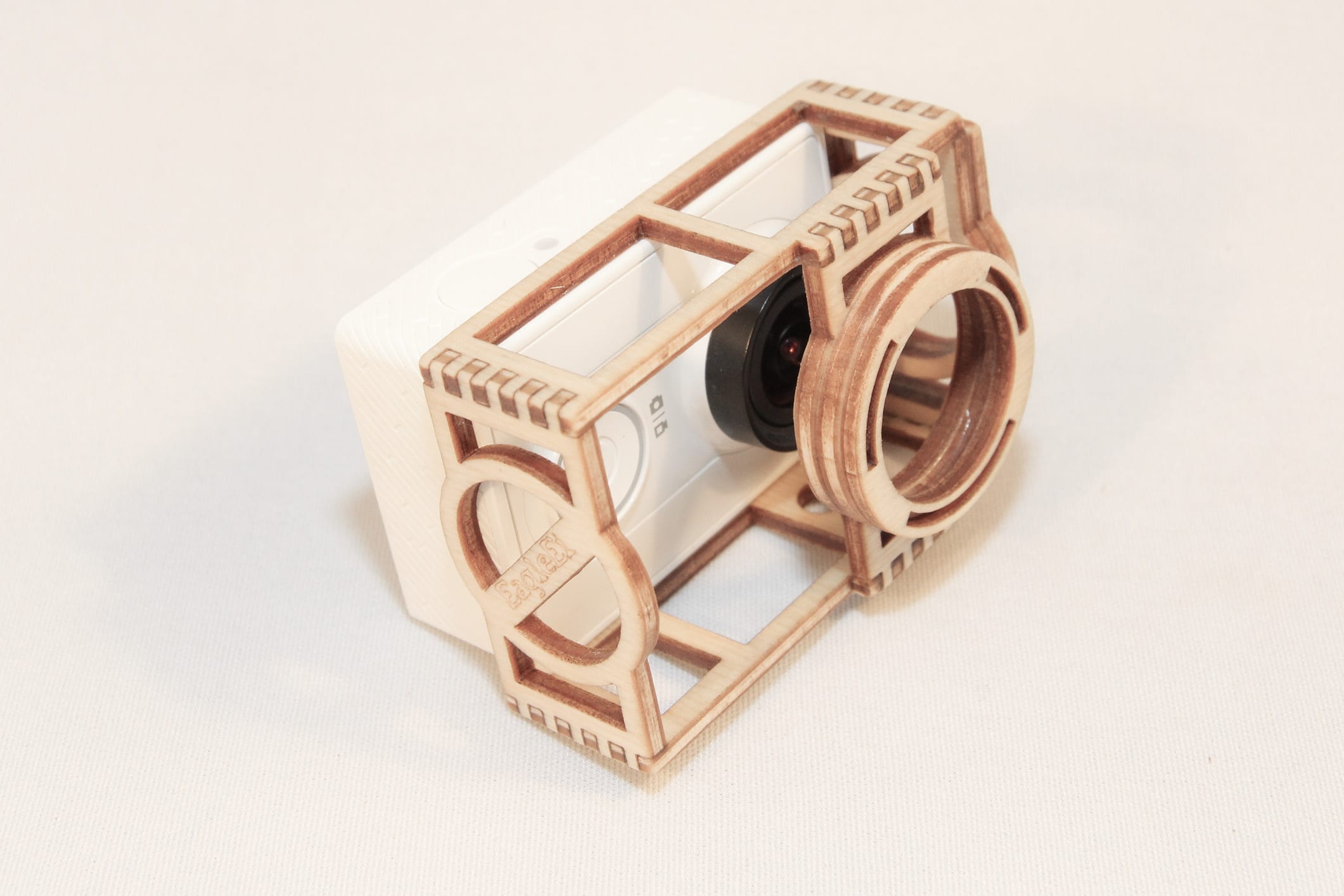

Auf der Unterseite kann die Xiaomi noch bei bedarf verschraubt werden.

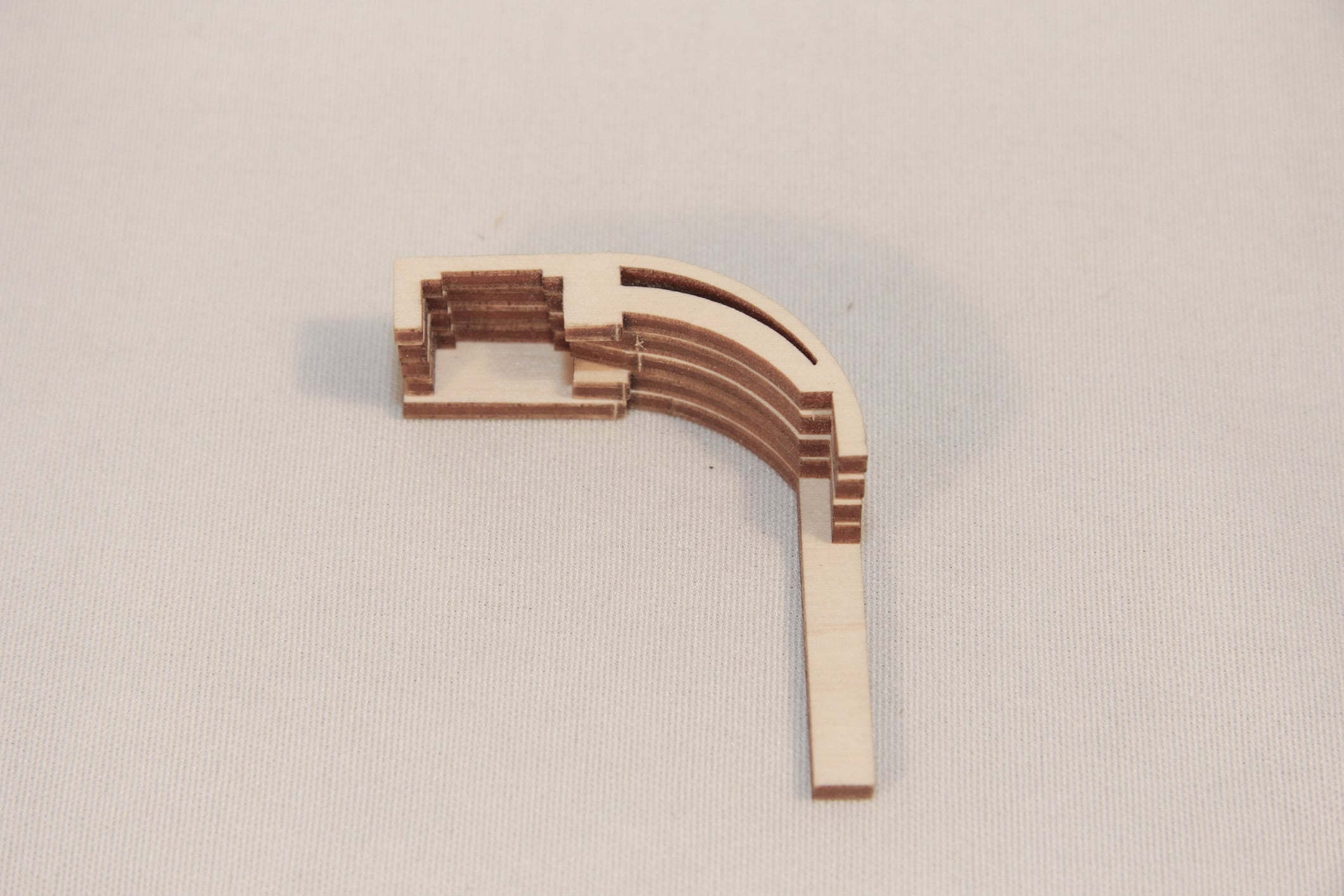
Nun zur Schwinge
bestehend aus 8 verklebten Teilen, bitte die Reihenfolge wie auf diesem Bild zu sehen beachten!
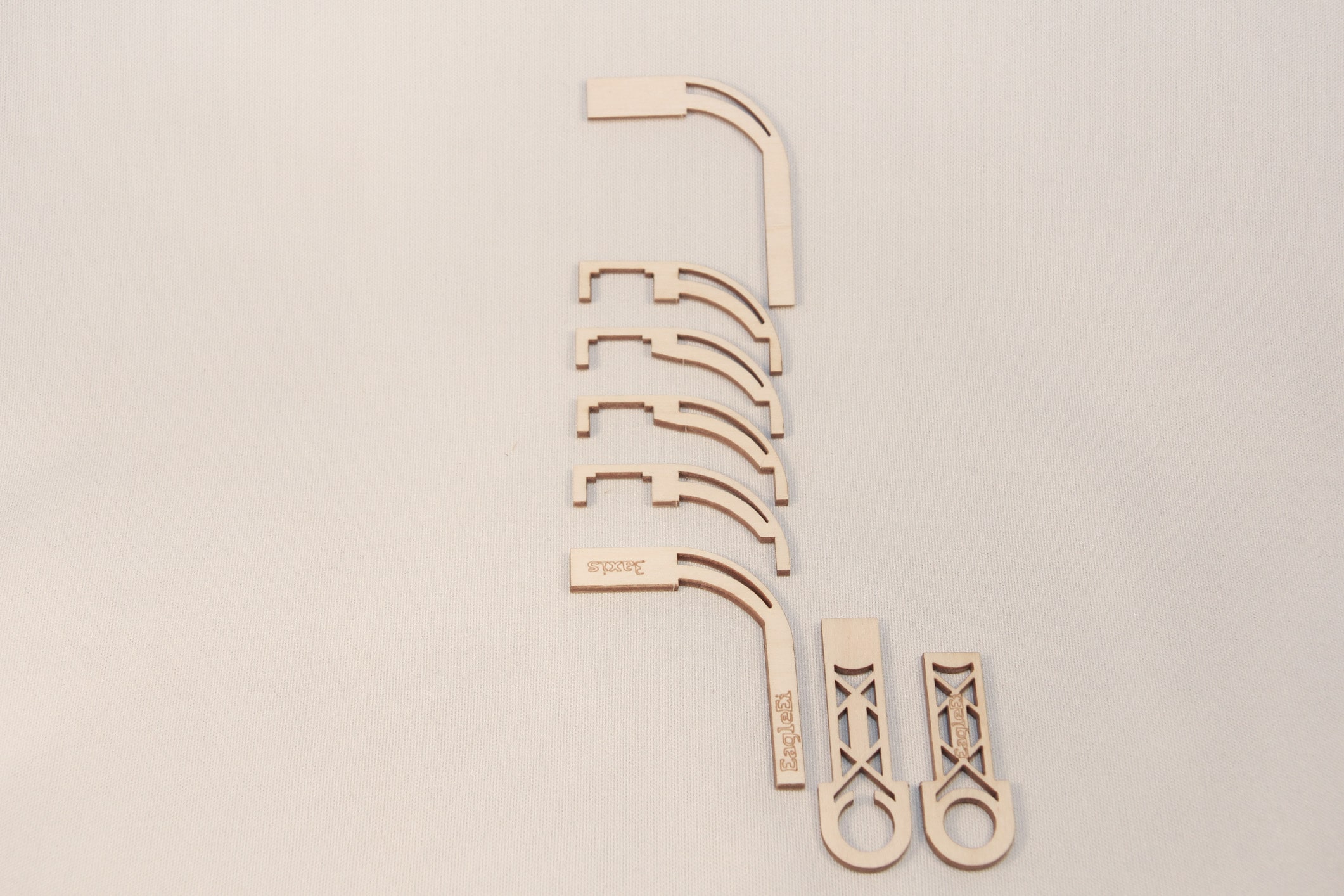
Die zwei Stege in der Mitte haben eine Vertiefung!
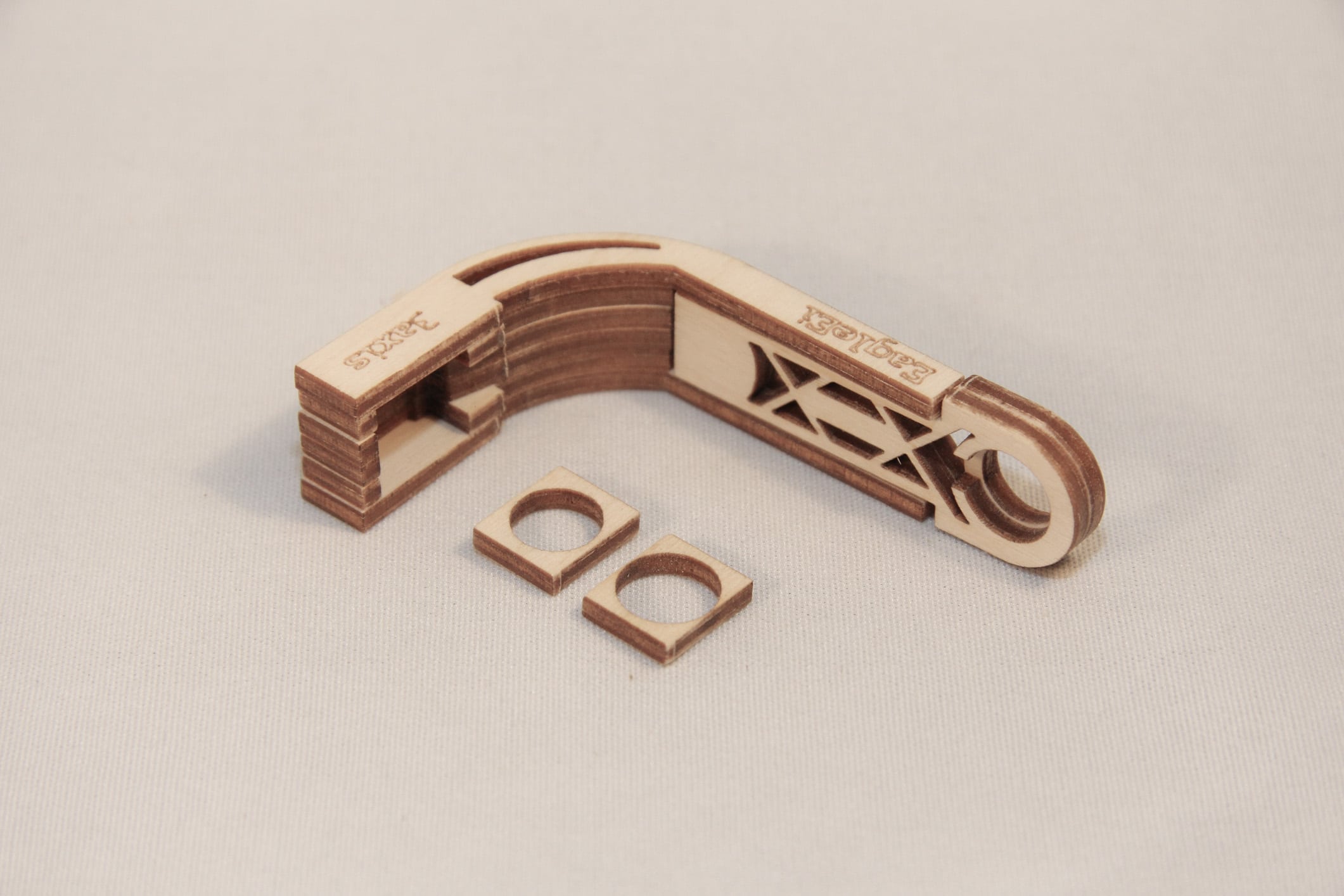
Nun werden die zwei Nubsis an der Schwinge verklebt und die zwei Rund auf Eckig Adapter eingesetzt! Achtung die Rund auf Eckig Adapter sind mit unterschiedlichen Durchmesser, der größere muss außen liegen!
und so sieht es dann verklebt, geschliffen und etwas geölt aus

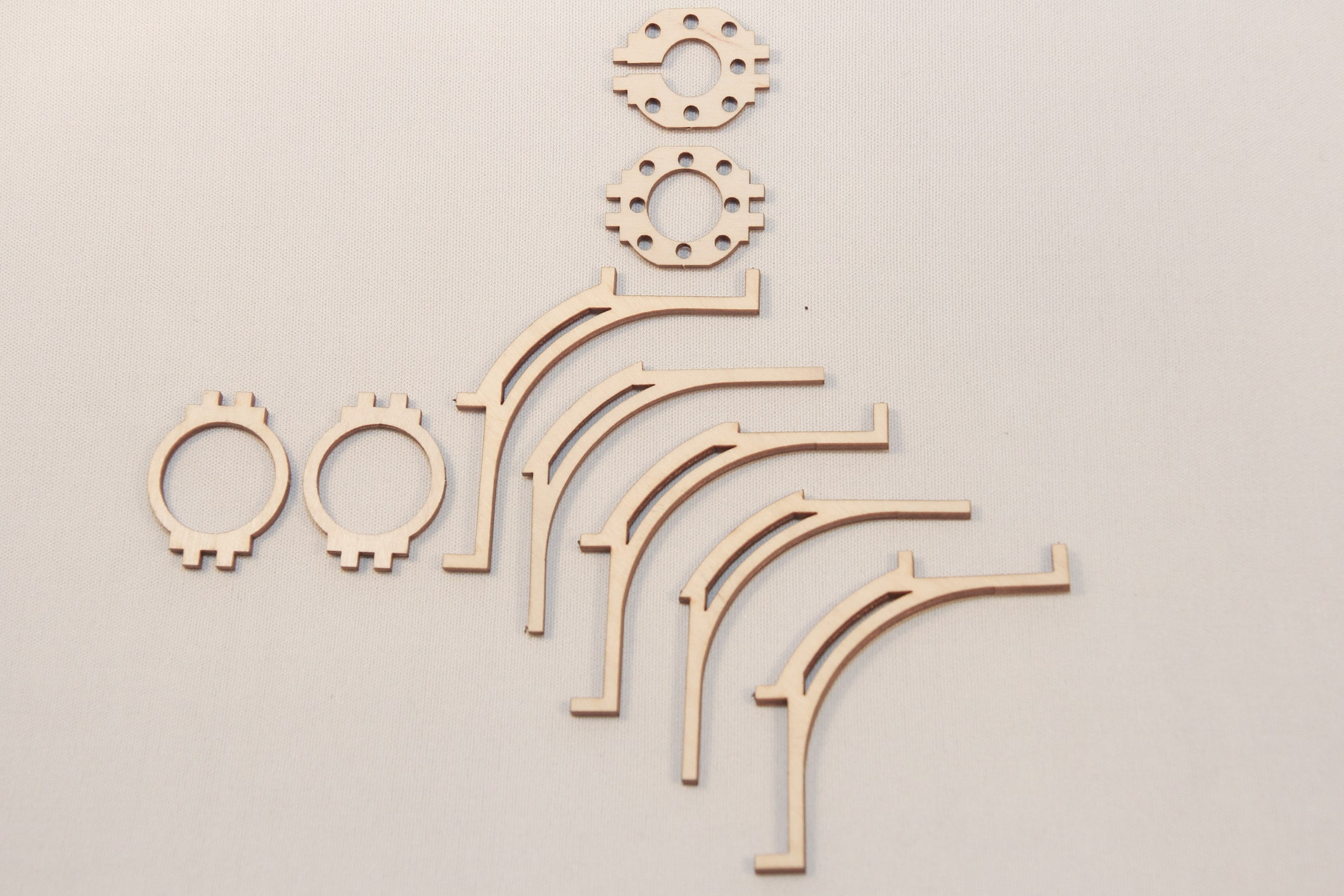
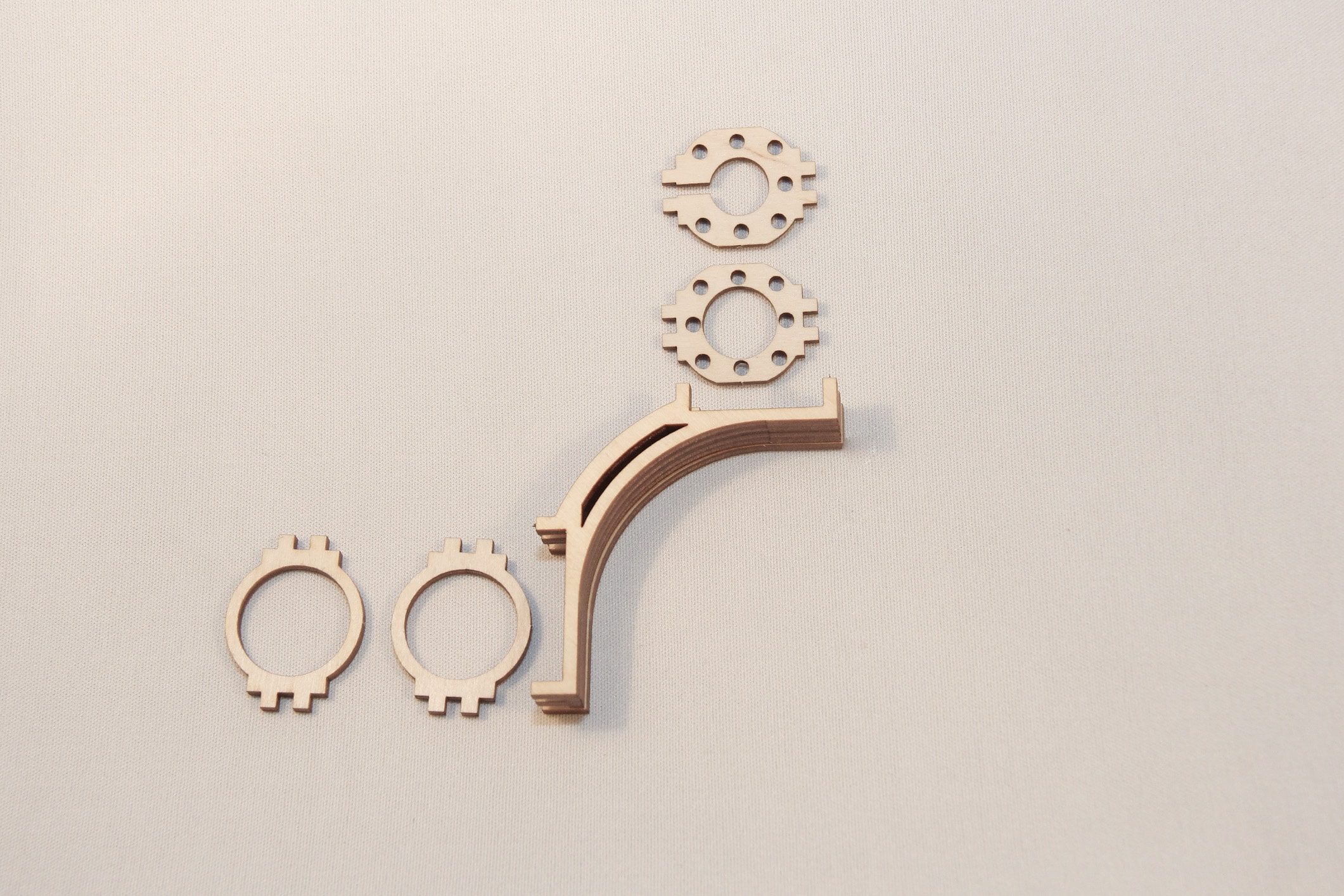
So nun zur hinteren Schwinge:
Bestehend aus neun Teilen, wieder die Reihenfolge beachten!



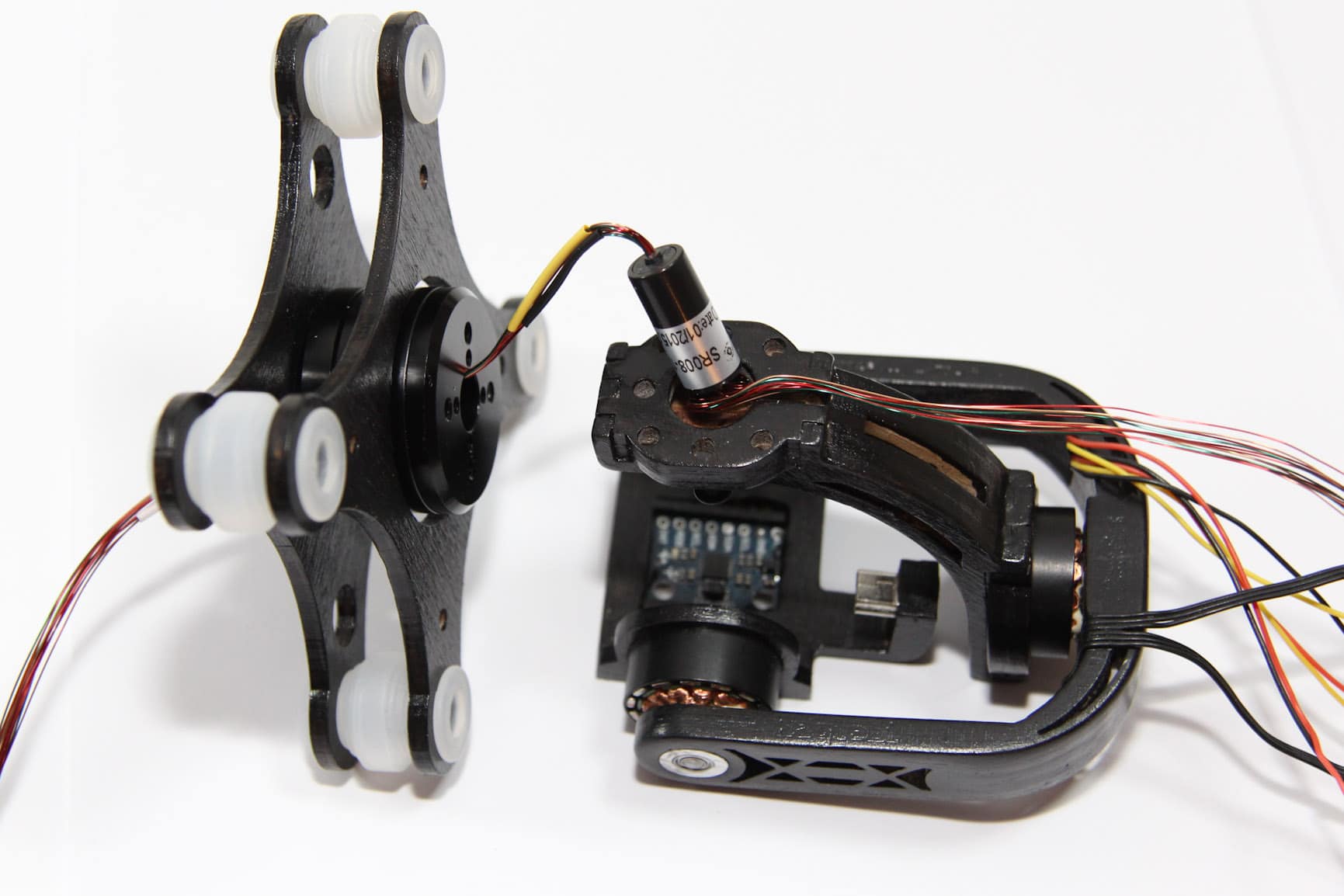
Nun kommt der YAW-Motor und die Dämpferplatten mit dran:



Dann sollten die drei Baugruppen fertig sein:
 22. September 2015 um 15:41 Uhr #1195
22. September 2015 um 15:41 Uhr #1195McJohn
TeilnehmerRespekt, sieht echt super aus.
Ein Bild mit den Motoren und Verkabelung wäre noch Toll.Sollte ich mein momentanes 3-Achs-Gimbal nicht hinbekommen (Controller…. -.-) werd ich mir wohl so eines bauen, Laserschneider hab ich schon ausfindig gemacht.
Wie ist das den mit dem Yaw-Motor und der restlichen Verkabelung? Wenn man mehr als 360° drehen will würde man noch einen zusätzlichen Schleifring benötigen?
Gruß
22. September 2015 um 18:09 Uhr #1202EagleEiAdministratorIm Moment habe ich leider keine Motoren und keine Schleifringkontakte da und warte ich noch auf die Lieferung, noch ca. drei Wochen!
Dann folgen hier natürlich weiter Bilder!
Hier findest du etwas über den Schleifring: YAW-Motorlasst uns möglichst hie nur über den Aufbau von dem EagleEi-Xiaomi 360° Gimbal sprechen, sonst verlieren wir den Überblick. Ich mach gerne noch ein „kurze Fragen….“ Thema hierzu auf.
29. Oktober 2015 um 9:59 Uhr #1313Dirk
TeilnehmerHallo,
bin nun beim Aufbau und hab ein kleines Problem.
Bei der hinteren Schwinge hab ich 10 Teile, in der Anleitung sinds aber nur 9.
Wo kommt den das zusätzliche Teil hin?29. Oktober 2015 um 23:25 Uhr #1326EagleEiAdministratorHallo Dirk,
oh je Ihr seit schneller mit dem Aufbau als ich mit den Bildern! 😉
Du hast recht, die hintere Schwinge kann in der aktuellen Version ob Mobius 360° oder Xiaomi 360° mit einer Sonder-Option aufgebaut werden.Es ist möglich in der Schwinge die Kabel zu verstauen, dafür kannst du optional das Mittelstück durch das offene Stegteil ersetzen, somit erhälst du einen kleinen Stauraum in der Schwinge für die Kabelverbindung!
Ist aber so oder so ein ziemliches gefummel!
Aufgebaut sollte es dann so in etwa aussehen.
 30. Oktober 2015 um 17:29 Uhr #1330Teilnehmer
30. Oktober 2015 um 17:29 Uhr #1330TeilnehmerOk alles klar, habs jetzt normal verleimt, ohne die Lücke.
Hat bis jetzt alles sehr gut gepasst.
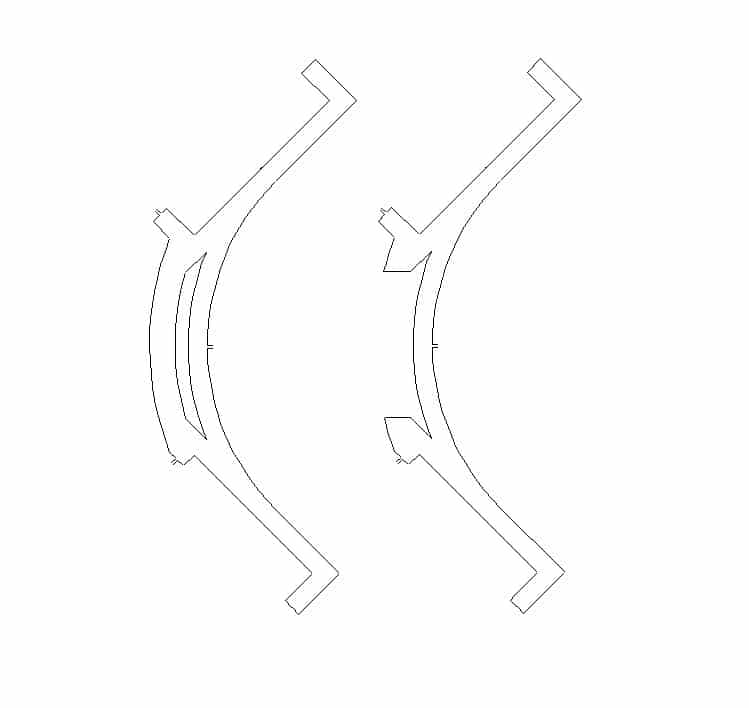
Die Motorwellen sind auch schon gekürzt, jetzt geht’s ans verkabeln.6. November 2015 um 18:41 Uhr #1351EagleEiAdministratorHier eine kleine Hilfestellung für die Hintere Schwinge:
7. November 2015 um 13:53 Uhr #1361TeilnehmerSo komplette Mechanik fertig, alle Motoren eingebaut und alles soweit verkabelt. Problem bis jetzt ist der Sensor der Kamera, wenn die Kabel durch den Schleifring gehen kommt es zu IMU errors sobald ein Akku angeschlossen wird, bei einer Stromversorgung über USB geht der Sensor, da sind die Motoren natürlich nicht angesteuert.
Bei einer Verkabelung ohne Schleifring gibt’s keine Probleme.
Noch jemand mit dem Problem?Gruß
Dirk7. November 2015 um 15:56 Uhr #1363EagleEiAdministratorDas ist normal bei 12V 3S, da hatte ich auch lange damit gekämpft! Die Lösung, du musst auf 2S runter und dann funktioniert es! Du kannst den Balancer einfach bei 2S abgreifen, dann passt alles!
Heute Abend stell ich euch noch die Einstellungen zur Verfügung!Gruß Benny
7. November 2015 um 17:47 Uhr #1368TeilnehmerAhh, ok werd ich probieren.
Danke7. November 2015 um 17:58 Uhr #1373EagleEiAdministratorGerne!
Schaut mal hier sind die Einstellungen die bei mir recht gut passen.
STORM32 EINSTELLUNGENund nun sind Bilder zur Verkabelung vorhanden!
H I E R !!!8. November 2015 um 11:13 Uhr #1427TeilnehmerMit 2S funktioniert es auch mit Schleifring ohne Fehler.
Wieder ein Schritt weiter 🙂17. November 2015 um 23:55 Uhr #1464Twan
TeilnehmerGibt es da Empfehlungen welchen 2s man da nehmen kann/soll? Oder eventuell einen Link ?
18. November 2015 um 0:17 Uhr #1465 GeorgModerator
GeorgModeratorDa habe ich heute was dazugelernt.
Du kannst bei einem größeren Akku (Flugakku) auch über den Balencerport nur 2S für den Gimbal abgreifen. Willst Du den Gimbal mit einem separaten Akku betreiben, geht denke ich mal jeder 2S, die größe bemisst sich an der Zeit wie lang er laufen soll. Da würde ich einen 2S von einer FatShark Brille empfehlen.
1. Dezember 2015 um 18:23 Uhr #1617 NeroModerator
NeroModeratorAuf Wunsch von Benny:
für die Verschraubung von JAW Motor und Dämpferplatte dürfen die mitgelieferten M3x8 Schrauben NICHT verwendet werden! Diese Schrauben zerstören die Wicklungen des Motors!Abgesehen davon ist die korrekte Anordnung der „Rund auf Eckig Adapter“ ist von Essenzieller Wichtigkeit wie ich heute feststellen musste.
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.