Open DIY Projects › Stuhlkreis › STorM32 Featuers › NT-IMU
- Dieses Thema hat 15 Antworten sowie 4 Teilnehmer und wurde zuletzt vor vor 9 Jahren, 8 Monaten von
 EagleEi aktualisiert.
EagleEi aktualisiert.
-
AutorBeiträge
-
5. Mai 2016 um 10:20 Uhr #2840EagleEiAdministrator
I started with NT-IMU too, because the features and never anymore I2C Errors I´ll never want to do without it again!!
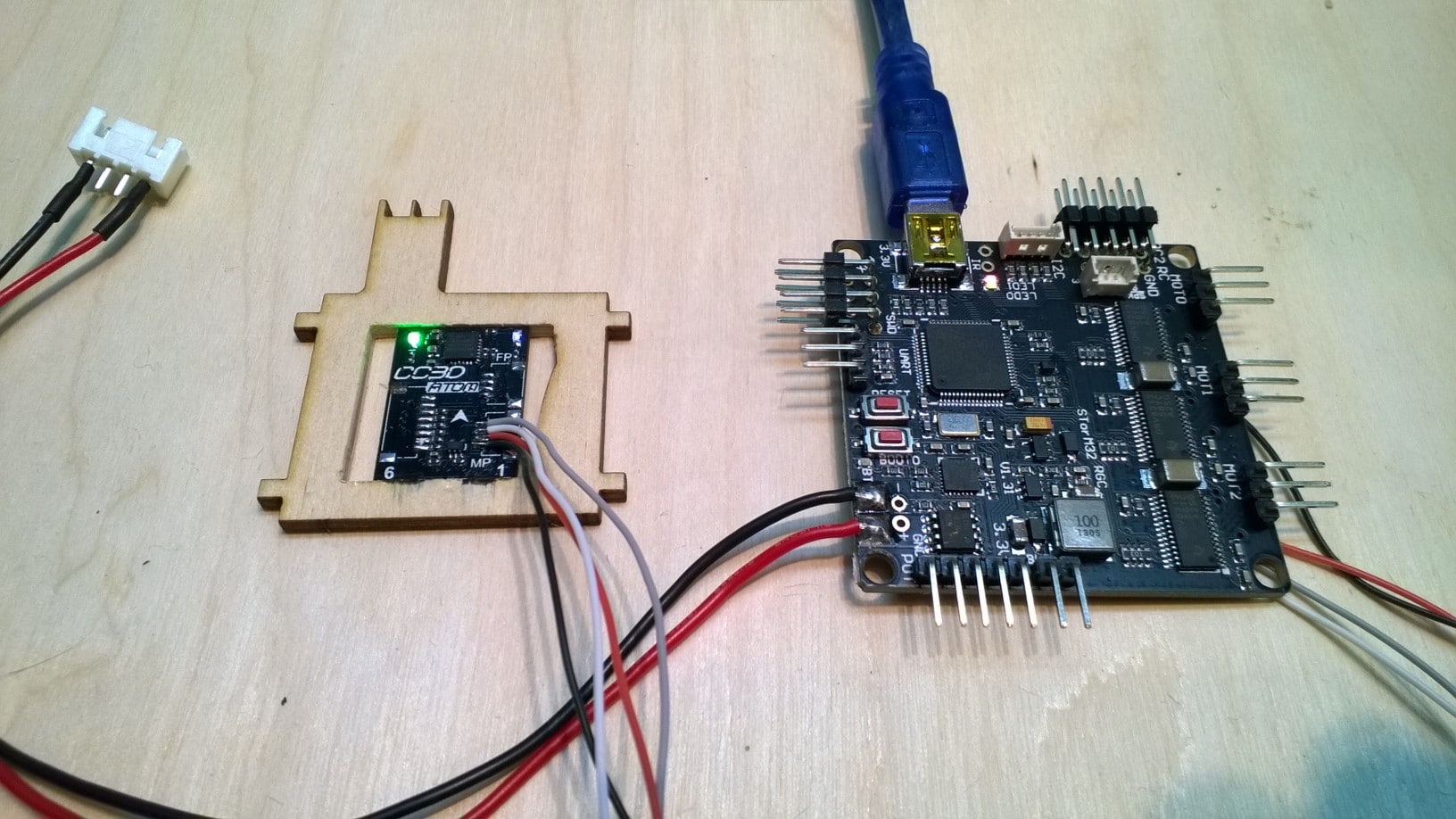
Here my Version with a CC3D Atom
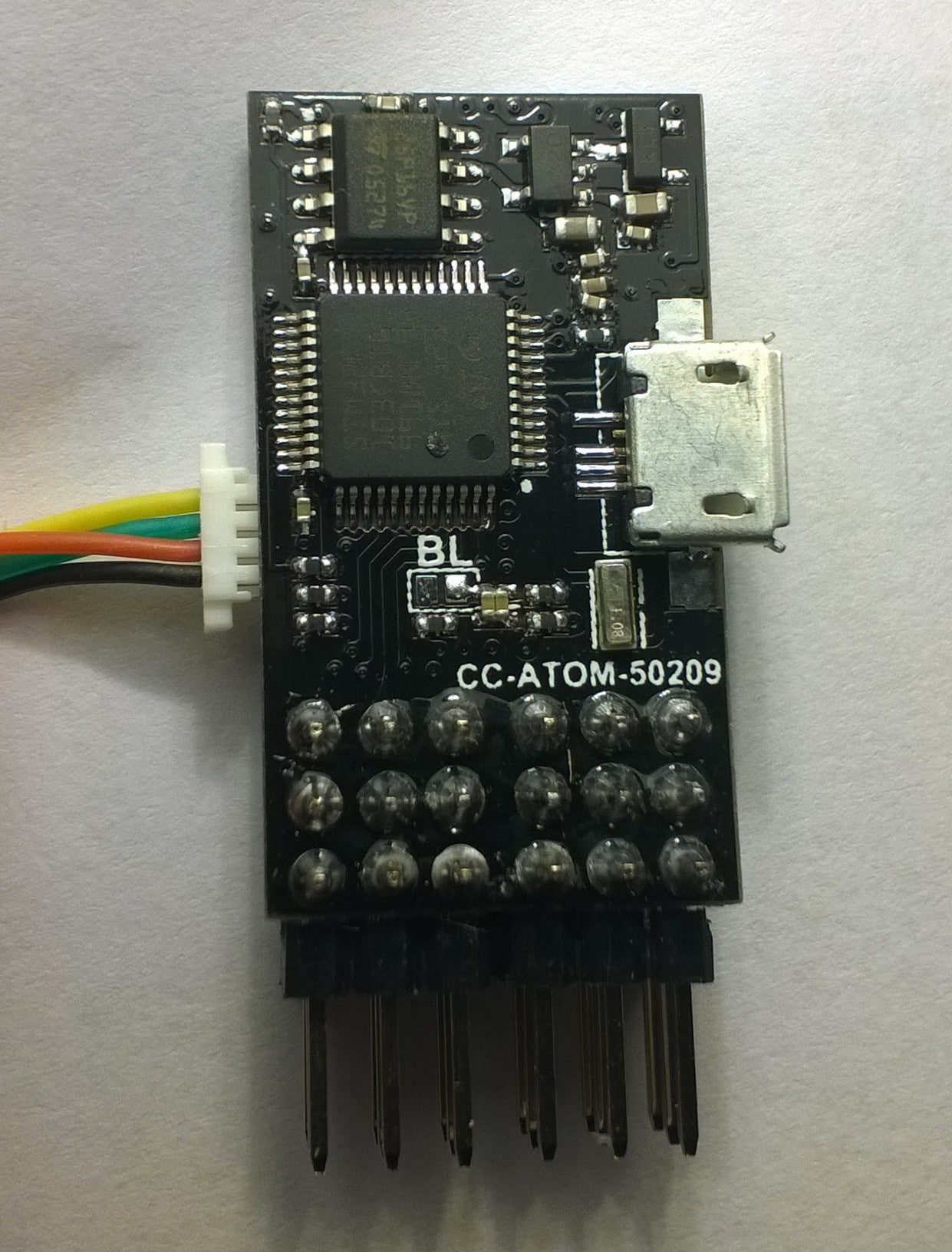
Original at firmware flashing:
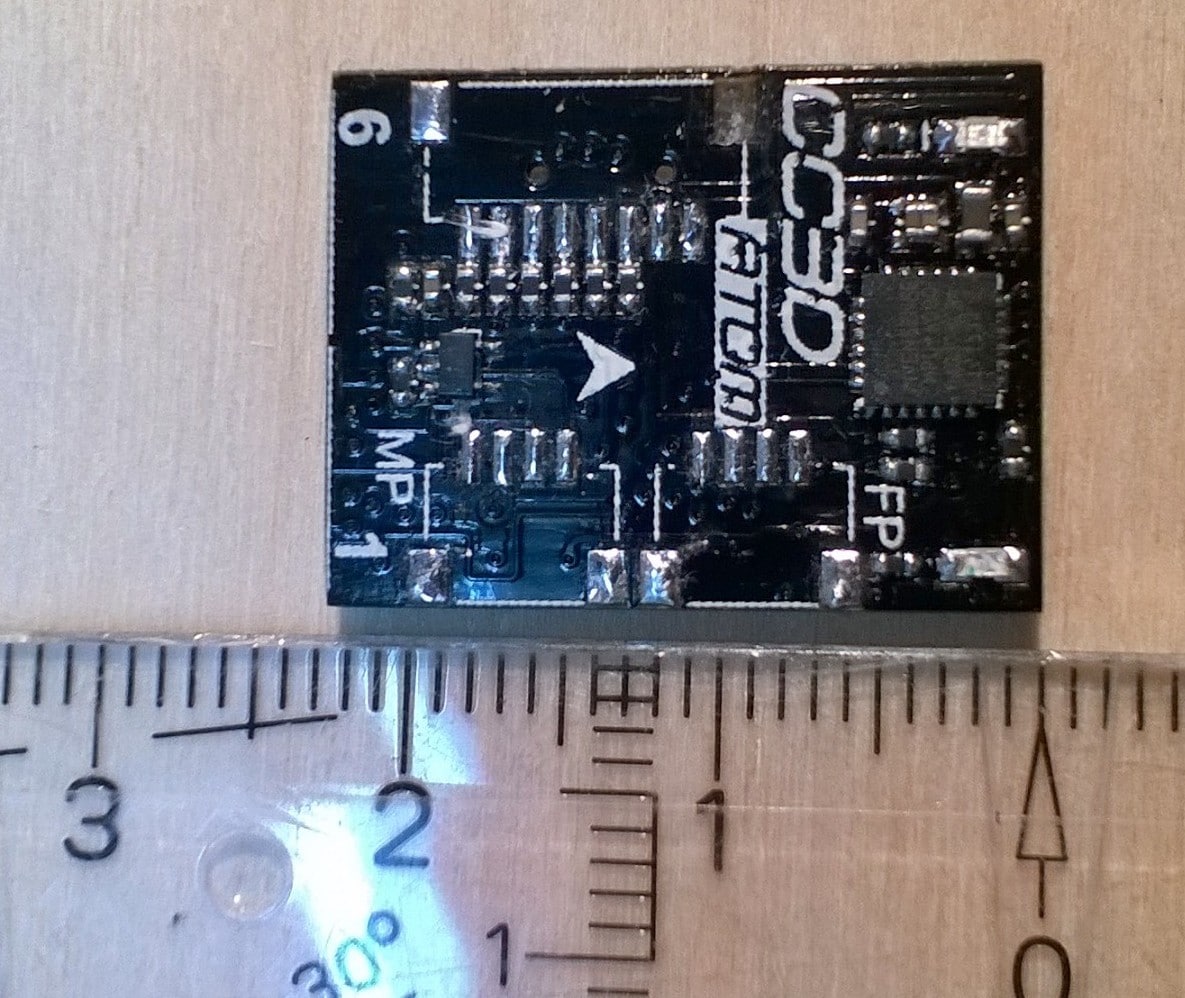
Here after cutting the PCB in the right possition and resoldering the connectors:
Here you can see, it works:

If any questions, just ask!
14. Mai 2016 um 19:43 Uhr #2872Ch3fk0ch
TeilnehmerHi,
ich hab jetzt auch die CC3D Atom.
Aber irgendwie klappt es mit dem flaschen nicht.Die BootLoader Pins sind doch die beiden auf der Rückseite wo „BL“ dran steht oder?
Die brücke ich, dann geb ich 5V auf das Atom.
Las ich dann die Brücke los oder halte ich die bis zum flaschen gebrückt (Klappt aber beides nicht)?Die Einstellungen habe ich von hier übernommen:
http://www.olliw.eu/storm32bgc-wiki/Flashing_the_CC3D_AtomWoran erkenne ich den ob sich das CC3D nun im Bootloader Modus befindet (kann könnte man mal schauen ob es daran liegt)
Als Meldung kommt immer:
STMicroelectronics UART Flash Loader command line v2.6.0 modified by OlliW, v18.05.2014 Opening Port [OK] Activating device [KO] ERROR: Unrecognized device. Please, reset your device and then try again. Press any key to continue ...Gruß
16. Mai 2016 um 21:38 Uhr #2873TeilnehmerOk,
der FTDI Adapter war im A…, mit nem neuen hats geklappt.
Und wenn man im Bootloader ist, dann ist nur die grüne Lampe an und nix blinkt.Grüße
16. Mai 2016 um 22:04 Uhr #2874EagleEiAdministratorSo, bin nun von meiner WE tour zurück.
hast du somit nun dein Gimbal mit NT imu am laufen?17. Mai 2016 um 12:00 Uhr #2876TeilnehmerNe, leider nicht.
Habe zwar keine I2C Errors mehr aber dafür einen neuen.Heute abend wollte ich mal andere USB-Anschlüsse und Kabel versuchen.
Olli weiß dazu auch nichts.(Bei der normalen IMU ist der Error ja nicht gekommen)
Attachments:
You must be logged in to view attached files.17. Mai 2016 um 19:51 Uhr #2879EagleEiAdministratormhhh…. oh mann, du bekommst echt alle Fehler der Strom32 Technik auf den Latz geknallt!
Bei mir hat das mit der NT-IMU auf anhieb funktioniert, daher bin ich aktuell etwas überfragt?
OK, wie bekommen wir dir nun deine IMU und dein Gimbal zu laufen?1. Frage, hast du die Möglichkeit uns auf der MakerFaire zu besuchen?
Dort könnten wir mal gemeinsam über dein Konstrukt schauen.deine IMU wird doch schonmal richtig erkannt, deine Firmware und die Verbindung passt zumindest mal!
Das Problem muss also in den Settings liegen!?
Nimm mal meine Einstellungen (Anhang) und schau was dein Gimbal macht.Wir bekommen dein Gimbal zum laufen, versprochen!
Attachments:
You must be logged in to view attached files.18. Mai 2016 um 16:39 Uhr #2881TeilnehmerHi,
Zur 1. Frage: Leider nein. Am 27. Jungesellenabschied vorbereiten, 28. Feiern, 29. tot^^Ich hab mal deine Settings reingespielt (Settings>Load from File>“Laden“>Write)
Dann hat die Cam nur wild hin und her gewackelt.
Ich verstehe auch nicht warum ich manuell Settings reinschreiben kann aber das Tool immer an der gleichen Stelle daran scheitert.
Auch habe ich auf OlliW’s anraten die anderen Versionen getestet, die gehen aber garnicht und geben wiederum BUS ERRORS aus.
Nach dem Abbruch des Tools funktioniert die Gimbal ja schon grob. Sprich es gleicht Bewegungen aus, wenn auch ein bisschen unbeholfen und auf der Roll-Achse „ruckt“ der Motor immer wenn er da was ausgleichen soll.
Gruß
18. Mai 2016 um 19:03 Uhr #2882TeilnehmerEs ist scheinbar ein Fehler in der Software.
Ich habe mal ein bisschen an ein paar werten rumgefummelt (auch wenn ich keine Ahnung habe wofür die sind) und jetzt geht es.Geändert habe ich in der „o323BGCTool.ini“ folgende Werte:
ReadIntervalTimeout=4294967295
ReadTotalTimeoutMultiplier=0
ReadTotalTimeoutConstant=0
ExecuteCmdTimeOutFirst=20
ExecuteCmdTimeOut=100
ExecuteCmdBTAddedTimeOut=10
MaxConnectionLost=4Welcher Wert es jetzt zum laufen bringt weiß ich nicht, aufjedenfall gibt das Tool jetzt keinen Fehler mehr aus.
Gruß
18. Mai 2016 um 19:38 Uhr #2883TeilnehmerAber das Rucken ist trotzdem nicht weg auf der Rollachse. Der Motor dreht ein wenig und springt dann wieder zurück. Außerdem werden die Motoren ziemlich warm.
Gruß
18. Mai 2016 um 22:28 Uhr #2884EagleEiAdministratorOk, zumindest bewegt sich mal was.
1. Die Motoren sollten max. leicht warm werden. Dreh mal die Power runter bzw. wenn du mit 12V arbeiten solltest nich kleiner.
Vorgehensweise: Ein Motor nach dem anderen, beginnend mit dem Pitch, dann Roll zum Schluss Yaw. Die Werte für die Pids konservativ einstellen, vorallem den Strom!Wenn ja prüfen ob sich das Gimbal initialisiert.
Mach mal ein paar Screenshots von deinen Pids und Setup zu deiner IMU.
19. Mai 2016 um 19:30 Uhr #2887TeilnehmerHi,
hier die Werte.
(Ich glaube das „Zucken/Rucken“ entsteht wenn schon ein ganz kleiner Wiederstand am Motor ist, z.B.: Kabel zu „stramm“ (auch wenn es sich mit der Hand ganz leicht bewegen lässt)).Morgen lege ich die Kabel nochmal um.
Zu dem ganzen Einstellen muss ich jetzt erstmal das Wiki durchlesen, sonst steig ich da nicht durch (Pitch Motor Vmax 150, keine Ahnung wofür 150 steht und sowas^^)
Gruß
Attachments:
You must be logged in to view attached files.1. Juni 2016 um 21:44 Uhr #2960TeilnehmerAlso so langsam habe ich keine lust mehr.
Das schließt das Config tool ab und dann machen die Motoren keinen mux mehr.Außerdem erkennt das config tool die halbe Zeit den Lipo nicht.
In der Übersicht wird er aber erkannt.2. Juni 2016 um 9:54 Uhr #2962TeilnehmerOk, Problem behoben.
Das war ein Kabelbruch schuld (das Teil ist echt verhext, bei allen Koptern und fliegern nicht so viele Probleme gehabt.)Jetzt geh ich noch an feintuning und dann sollte die Gimbal auch mal fertig sein.
Gruß
2. Juni 2016 um 22:28 Uhr #2963 GeorgModerator
GeorgModeratorHallo Ch3fk0ch,
Freut mich das Du den Fehler gefunden hast.
Hoffe jetzt klappt auch alles weitere.
Benny unser Experte ist zur Zeit im Urlaub, desswegen etwas spärliche Antworten auf Deine Problematik.
Kann Dir aber versichern, dass Du mit dem Gimbal, wenn er funktioniert, viel spaß haben kannst. Meiner, als umgebauter Handgimbal hat auf der Maker Faire viele begeistern können. Und ins Regionalfernsehen hat er es auch geschafft.hoffe das Deiner genauso gut funktionieren wird, und Du viel Freude, anstatt wie bisher nur Frust, damit haben wirst.
18. Juli 2016 um 17:27 Uhr #3147BenJo
TeilnehmerMal eine Frage: was verbessert die nt-IMU an der Gimbalsteuerung, dem Board liegt ja auch eine Messeinheit bei…
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.