Open DIY Projects › Stuhlkreis › WiFree Copter › Erfahrungen WiFree Neubau 2020
- Dieses Thema hat 20 Antworten sowie 7 Teilnehmer und wurde zuletzt vor vor 5 Jahren, 11 Monaten von
christoph_herrmann aktualisiert.
-
AutorBeiträge
-
3. Januar 2020 um 23:37 Uhr #5150
 CKolumbusTeilnehmer
CKolumbusTeilnehmerHiermit möchte ich einen neuen Thread für alle Wagemutigen eröffnen, die auch 2020 noch einen WiFree Copter bauen wollen!
@ba0547 & @bmwnext27: lasst uns mal hier unsere neuesten Erfahrungen posten damit alle was davon haben!3. Januar 2020 um 23:49 Uhr #5151CKolumbusTeilnehmerUnser momentaner Status:
Wir haben mal die „v2“ Druckdaten aus dem Forum genommen und ohne den Rotorschutz an der Uni im FAB-Lab gedruckt! Die hatten kein HT-PLA, die erste Version ist also mit normalem Filament gedruckt. Mal schauen, wie das hält.
Momentan nehmen wir den FlightController in Betrieb. Das war schon nicht so einfach: der CC3D wird von dem vorgeschlagenen INav schon lange nicht mehr unterstützt. Da wir aber auch noch nicht so viel Erfahrung haben wollten wir nicht gleich auf eine andere Software ausweichen. INav 1.7.3 ließ sich dann aber flashen und läuft auch. Wenn alles gut geht drehen sich heute noch die Motoren 🙂
Hier meine Notizen bisher:
Flashing flight controller:
As of 2019 cc3d is not supported by newest INAV any more. Latest version for CC3D is 1.7.3- additional info available at fpv-community.de
- latest working INAV on github
- Windows/Mac configurator standalone
Process: flash cc3d with above software
- need FTDI on „main“ connector
- use INAV configurator to flash (not stm32)
- solder bridge to enable flashing
- in inav configuration: manually select baud rate (115200)
Die Konfiguration läuft danach auch etwas anders da sich die Oberfläche und die Art der Parametereingabe geändert haben. Da haben wir mal nach bestem Wissen und Gewissen die Einträge gemacht 🙂 Mehr Info, wenn/falls sich mal die Motoren drehen!
Gruss
Chris4. Januar 2020 um 10:15 Uhr #5152ba0547
TeilnehmerHallo Chris,
danke das du einen neuen Beitrag hier gestartet hast. Ich denke nicht das du mit der INAV Firmware 1.1.3 erfolgreich sein wirst. Nach dem Flashen kannst du vielleicht noch die Motoren starten und einige Dinge kalibrieren. Nachdem was ich hier gelesen habe wirst du damit aber keine Verbindung zum Raspi bekommen. Das Problem bei den „neueren“ Firmwares ist das die kein MSP Protokoll mehr unterstützen. Das wurde offensichtlich entfernt, wird aber für die Ansteuerung vom Raspi erwartet.
Lösung könnte sein das man eine alte INAV Firmware 1.0 oder 1.1 auf den CC3D flasht diese dann irgenwie konfiguriert. Dabei ist das Problem das man die alte inav-config 1.0.0 nicht mehr bekommt. Das älteste was ich gesehen habe war 1.5.6, mit der konnte ich die Firmware nicht ansprechen, bekam keine Verbindung zum CC3D. Dann hab ich es mit Cleanfligt in alt versucht, auch hier das gleiche Problem. Hab auch librepilot versucht, auch hier mit keinem Ergebnis. Vielleicht ist das was ich hier schreibe auch falsch und du bekommst eine Verbindung mit deiner Firmware.
Wenn nicht, sehe ich nur noch die Lösung mittels eines anderen FlightControllers, z.b. NAZE oder FLIP. Hier wird aber auch wieder das Problem sein, welche Firmware geht? Hilfreich wäre zu wissen welche Kombinationen, Firmware>Controller funktionieren. Dazu bräuchte man die Informationen von Leuten die es geschafft haben das Ding zum fliegen zu bekommen.Viele Grüße und viel Erfolg, Harald.
9. Januar 2020 um 14:28 Uhr #5153HansImGlueck
TeilnehmerHallo und ein Frohes Neues noch!
Das finde ich ja klasse, dass es hier noch jemanden gibt, der sich auch auch noch nach so langer Zeit an dieses Projekt wagt! Ich bin schon damals, als die ct Make über den Copter berichtet hat, darauf aufmerksam geworden und hatte mir vorgenommen, das Teil mal irgendwann zu bauen. Die Zutaten hatte ich mir vor drei Jahren direkt bestellt und dann lagen sie erst einmal in der Ecke. Jetzt im Dezember hatte mein 3D-Drucker gerade nichts zu tun und so dachte ich mir, ich könnte ja jetzt doch mal langsam anfangen…
Ich habe mir auch das empfohlene, teure HT-PLA besorgt, welches – aus meiner Sicht – ein wirklich tolles Material ist mit wirklich guter Layerhaftung. Ich habe mir angewöhnt, mit 4mm Brim zu drucken. Verzogen hat sich nichts – alles top! Allerdings erfordert der Brim doch einiges an Nacharbeit – aber nicht weiter schlimm. Gedruckt mit einem Anycubic i3 Mega (vorher noch mal extra kalibriert).
Über Weihnachten ruhte das Projekt dann mal wieder kurz und zwischen den Jahren wollte ich mich dann um die Elektronik kümmern.
Was für ein Krampf! Zum ersten ist die INAV 1.1 kaum zu finden. Hab mich jedenfalls extrem schwer damit getan und auch die Controller Version 1.7.3 (die letzte Version, die die 1.1 noch unterstützt) war nicht einfach aufzutreiben. Bei dieser Gelegenheit vielen Dank an Chris für die Links – die INAV 1.7.3 als Standalone kannte ich nicht und über den Link habe ich dann auch das HEX-File der Version 1.1 entdeckt.
Dann hatte ich irre Probleme, Windows 10 zur Zusammenarbeit mit dem CC3D zu bewegen. Hat mich einen ganzen Tag gekostet – sowas hab ich noch nicht oft erlebt! Am Ende hatte ich an einem alten Windows 7 PC Erfolg. Vorher musste ich mich mit diversen USB-Treibern für den FTDI-Chip herumschlagen und natürlich mit dem STM32-Kram (Treiber & Flash-Tool). War nicht schön, aber schließlich hat alles funktioniert und es konnte weitergehen.
Als gute Möglichkeit, den CC3D in den Flash-Modus zu versetzen, hat sich dabei zum Überbrücken der entsprechenden Pins übrigens ein Stück Entlöt-Litze erwiesen. Die besteht bekanntlich aus gut leitendem Kupfer-Geflecht und ist eben deutlich breiter, als ein einfacher, massiver Kupferdraht. Beim Einschalten das Stück Entlötlitze mit dem Daumen kräftig auf die beiden Lötpunkte drücken.Inzwischen habe ich mit dem Zusammenbau begonnen und hätte bei der Gelegenheit direkt einige Verbesserungsvorschläge für das gedruckte Gehäuse, wobei das bitte nicht falsch verstanden werden soll. Ich konstruiere inzwischen selbst viele Teile und kann mir von daher gut vorstellen, wie viel Arbeit schon in dem WiFree steckt. Bei dieser Gelegenheit noch mal vielen Dank auch an die Initiatoren dieses Projekts.
Also nun zu meinen Anmerkungen:
1. Bei meinem CC3D passen die Lochabstände der Dome nicht. Der Flightcontroller lässt sich nur mit zwei Schrauben befestigen. Habe inzwischen recherchiert, dass der Lochabstand 30,5mm sein muss. Gemessen habe ich bei der importierten STL-Datei aber 30,0mm.
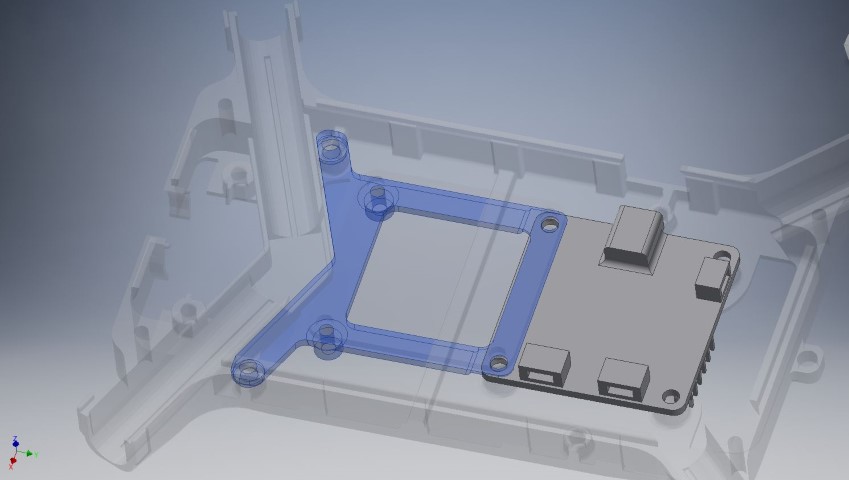
2. Vielleicht gab es die damals noch nicht, aber inzwischen kann man beispielsweise von Matek günstige „Mini Power Hubs“ in den Abmessungen 36x36mm (CC3D-Maß) finden, die den Stepdown-Konverter auf 5V direkt onboard haben. Der Lochabstand ist auch hier 30,5mm. Die Platine passt noch sehr gut neben das CC3D und wird mir die Verkabelung sehr erleichtern. Gerade konstruiere ich einen kleinen Rahmen, um das Verteiler-Board dort gut unterbringen zu können. Wenn ich fertig bin und alles passt, stelle ich den Rahmen gern hier ein. Einfacher wäre es, wenn im Copter-Frame dafür die entsprechenden Schraub-Dome bereits vorhanden wären.
Naja – so viel erstmal zu meinem aktuellen Stand. Wenn’s was Neues gibt, melde ich mich wieder.
Gruß,
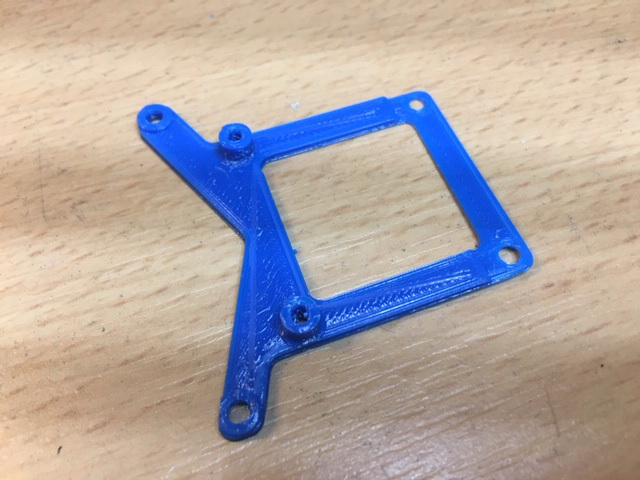
Martin10. Januar 2020 um 22:09 Uhr #5154Teilnehmer…sooo – bin ein Stückchen weiter. Ich hab da mal was hingefummelt – nicht besonders schön, aber funktioniert (STL im Anhang):
 18. Januar 2020 um 14:06 Uhr #5155
18. Januar 2020 um 14:06 Uhr #5155bmwnext27
TeilnehmerServus Martin,
deine Konstruktion sieht echt gut aus!! Ich selber fange grade mit dem Bau der Drohne an und bestelle mir jetzt wahrscheinlich auch den Mini Power Hub, der macht die Verkabelung doch wesentlich einfacher. Könntest du mir vielleicht die STL-Dateien deiner Halterung irgendwie zukommen lassen? Im Anhang deines Beitrags wird die mir nicht angezeigt…
Vielen Dank schonmal im Voraus!
LG Manuel
P.S: Welche ESC’s benutzt du denn? Bin mit meinen noch nicht ganz zufrieden und spiele mit dem Gedanken mir ein 4in1 ESC zu kaufen25. Januar 2020 um 22:26 Uhr #5156TeilnehmerHallo Manuel,
die wollte ich eigentlich schon beim letzten mal mit anhängen, aber das hat irgendwie nicht geklappt – leider… ich versuche es noch einmal.
Attachments:
You must be logged in to view attached files.25. Januar 2020 um 22:29 Uhr #5158TeilnehmerNoch vergessen… unbedingt Kunststoffscheiben unter die Schrauben legen, wenn die aus Metall sein sollten (so wie bei mir). Sonst droht Kurzschluss!!
14. Februar 2020 um 13:04 Uhr #5166fr4ggle
TeilnehmerMoinsn,
Endlich kommt wieder Leben in dieses Forum!
Ich habe schon länger alle Teile da:
ESCs
FC
Spannungswandler
Motoren
Kamera (IR)
Kamerakabel für RaspiZeroWDie ESCs sind etwas überdimensioniert, aber sie waren im Angebot. Die Kamera war eher ein Versehen, aber ich denke tagsüber sollte man trotzdem ein Bild bekommen und in der Dämmerung könnte man dann noch eine IR-LED zuschalten 😉
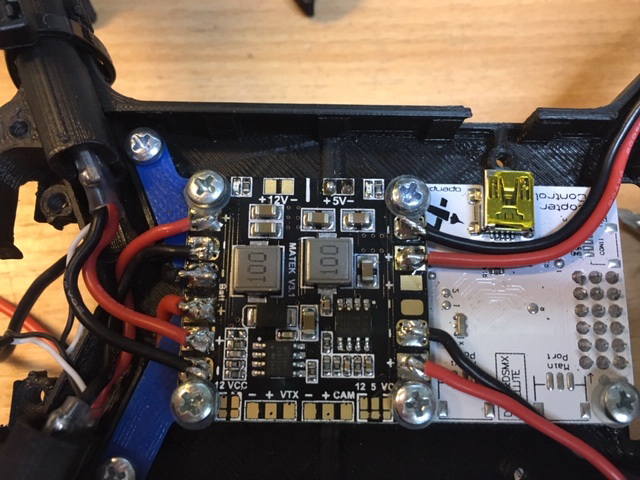
Den FC habe ich ausgewählt, da er Barometer und Kompass hat und auch GPS und einiges mehr nachgerüstet werden könnte. Ich bin zwar Neuling auf dem Gebiet, aber ich baue ungern Sachen zusammen, die nicht Erweiterbar sind. Größtenteils ist auch schon alles zusammengebaut (siehe Bild). Aber mangels Aktivität im Forum bin ich leider nicht weiter gekommen.
Mit dem FC habe ich mir einige Fragen/Probleme ins Haus geholt, da ich absolut nicht vom Fach bin:
1. die Signalkabel der ESCs habe ich wie in der Anleitung mit dem CCD3 hier im Forum über die Motorenpins des FC verlötet. Ich habe allerdings nicht das GND-Kabel abgeklipst, sondern an den entsprechenden Pin am FC gelötet. Kann man so machen, oder?
2. die Stromkabel der ESCs sind 18AWG, also etwas dicker. Da ja etwas wenig Platz ist im Gehäuse würde ich die durch dünnere (22AWG?) ersetzen. Ich reize die 35A pro ESC ja nicht aus, also sollte ein dünnerer Kabelquerschnitt ausreichen, oder? Euer neues Teil zum Einbau des Mini-Power-Hubs ist zwar echt cool, aber mit meinem FC wäre da wo der FC und das Hub überlappen ein Port im Weg. Die Höhe des mittleren Rahmens würde hier leider nicht ausreichen um beides übereinander zu bekommen.
3. Für die Kommunikation mit dem Raspi und die Stromversorgung würde ich den UART2 des FCs benutzen, richtig (FC-Manual)? Dieser hat GND, Vcc (5V),TxD (Datensendekanal) und RxD (Datenempfangskanal). Die anderen beiden UARTs scheiden aus, da UART3->3,3V und UART1->nicht gleichzeitig mit USB-Port betreibbar. Oder muss ich zur Kommunikation mit dem Raspi einen der IO-Ports verwenden?
4. Ich habe (aus einer Laune heraus) mal betaflight auf den FC geladen. Das habe ich allerdings nur mit einem Windoof-Rechner hinbekommen, da mein Ubuntu trotz vorhandener Treiber nicht per USB mit dem FC kommunizieren will. Ich habe zwar per
sudo usermod -aG dialout BENUTZERNAME
mich der dialoutgruppe hinzugefügt, aber irgendwie scheint das nicht zu funzen. Kommt betaflight mit dem MSP-Protokoll klar?Ihr seht schon, ich habe von der Materie bisher kaum einen Plan und suche mir gerade meine Infos in verschiedenen Quellen zusammen. Daher freue ich mich auf regen Austausch mit Euch. Hoffentlich können wir zusammen den WiFreeCopter etwas updaten und erweitern.
LG,
Clemens
Attachments:
You must be logged in to view attached files.14. Februar 2020 um 13:58 Uhr #5168TeilnehmerDas Problem mit betaflight und Linux ist wohl ein Berechtigungsproblem. Mit
dmesg | grep "cp210x"USB-Device für FC finden. etwa ttyUSB0
chmod 777 /dev/USBDEVICENAMElese schreib und ausführungsrechte für USBDEVICE setzen. Im Beispiel ttyUSB0 einsetzen.sollte betaflight den FC finden.
17. Februar 2020 um 20:42 Uhr #5169motorengk
TeilnehmerHallo
Mein WiFree-Copter ist eigentlich fertig aufgebaut, nur kriege ich keine Verbindung von der Handy-App zum Motorkontroller.
Meine Ausgangslage:
Raspberry-Pi Zero mit 16 GB Sandisc Class 10 darauf das Image: wf-2017 03 20a
WiFree-App ist: 1.3_13.10.2017
Die Configuration ist laut den Bilder im Anhang.
Was mich ein bisschen irritiert ist das Signal, das nach dem hochfahren des Raspi an PIN8 (GPIO 14) erscheint. (siehe auch Bild) Das Signal ist zwar schön sauber, aber es bewegt sich nur zwischen ca. 3.3 und 2.3 Volt. Meiner Meinung nach sollte es gegen 0 V gehen.
Beim verbinden des Handys mit dem WLAN ist zunächst alles i.o. Das Bild wird vom Raspi empfangen, erst wenn bei der App links oben auf orange oder rot umgestellt wird, schaltet die APP das Ausrufezeichen sofort auf rot. Alle ARM’s sind grün. Die Motoren können mit dem INAV-Configurator (v. 1.6.2) und dem Laptop problemlos angesteuert werden.Hat jemand eine Idee wie ich das beheben kann?
Gerhard
Attachments:
You must be logged in to view attached files.19. Februar 2020 um 10:08 Uhr #5173TeilnehmerHi Gerhard,
ich bin absolut nicht vom Fach, aber da Du ein FLUKE-Multimeter nutzt, nehme ich an Du bist vom Fach. Aber man kann ja nie wissen, daher trotzdem die etwas dumme Frage: Gegen was bzw. wie hast Du das Signal gemessen? Evtl. liegt das Signal nicht gegen GND an.
Andere Möglichkeit:
Das Signal muss ja nicht unbedingt das volle Potenzial nutzen. Evtl. ist zwar die Spannung 3.3V aber das Signal, bzw. die Modulation der Spannung die das Signal darstellt, nur 1V.
Macht irgendwas davon Sinn? Manchmal helfen ja unbeholfene fachfremde Denkweisen um Probleme zu lösen 😉LG,
Clemens
19. Februar 2020 um 11:11 Uhr #5174TeilnehmerHi Clemens
Danke für deine rasche Antwort. Ich bin ein bisschen vom Pech verfolgt. Ich habe hier zwei CC3D-Controller und offenbar haben beide einen Fehler. Der eine (helle Platine) konnte ich nach dem Flashen der Firmware auf der USB-Schnittstelle nicht mehr ansprechen. Ich habe mehrere Versionen geflasht, ohne Erfolg. Dafür habe ich bei diesem das Signal, das ich mir vorstelle. (Sauberes rechteck von 3.3 und 0 Volt) Der zweite Controller (dunkle Platine) hat offenbar einen zu kleinen Widerstand erhalten, daher geht die Spannung nicht auf null. Die UART3 Eingänge werden ja mit einem Offset-Widerstand von 10k Ohm auf 3.3V gezogen, also muss ich gegen GND messen. Ich bleibe am Ball und melde mich wieder wenn ich mehr weiss.
LG
Gerhard
24. März 2020 um 21:05 Uhr #5482TeilnehmerHi,
Ich habe in meinem WiFreeCopter einen Sp racing f3 verbaut. Irgendwie bekomme ich außer betaflight keine andere Firmware darauf zum Laufen. Daher habe ich jetzt versucht das Ganze damit zu lösen.
Ich habe schön brav den UART3 mit dem Raspi verbunden, und unter „Anschlüsse“->“Konfiguration/MSP“ den Schalter für UART3 auf „an“ gestellt und „9600“ ausgewählt. Irgendwie bekomme ich aber betaflight nicht dazu auf das MSP umzustellen. Jedes Mal wenn ich unter „Konfiguration“->“Empfänger“ „MSP Empfänger“ auswähle und dann speichere, springt die Auswahl wieder auf „PPM Empfänger“ zurück.
Mache ich da was komplett falsch, oder ist das ein Fehler in der Firmware?Liebe Grüße und danke für Eure Kommentare!
Clemens
24. März 2020 um 21:16 Uhr #5484TeilnehmerHi Gerhard,
Ich habe eben nochmal über dein Problem mit dem nicht mehr ansprechbaren CC3D-Controller nachgedacht. Wenn ich den Kontakt zum SpRacingF3-Controller verliere, kann ich ihn neu flashen indem ich zwei Bootpins verbinde. Die genaue Prozedur steht im betaflight-Konfigurator unter „Firmware Flasher“ ganz unten unter der Überschrift „Wiederherstellung/abgebrochene Kommunikation“ in dem gelben Kasten.
Ich weiß nicht wie es im INAV-Konfigurator aussieht, aber die Dinger sind ja nicht sehr unterschiedlich.Liebe Grüße,
Clemens
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.