Open DIY Projects › Stuhlkreis › talking english… › EagleEI Gimbal 3 Axis – Questions
- Dieses Thema hat 11 Antworten sowie 4 Teilnehmer und wurde zuletzt vor 10 Jahren, 2 Monaten von
OhioPilot aktualisiert.
-
AutorBeiträge
-
23. Dezember 2015 um 23:07 Uhr #1850
OhioPilot
TeilnehmerAfter a little struggling finding my way around your website, I think this is the best area to post my questions.
To help you answer my questions, I’ve attached a Word document that contains a snapshot of the gimbal parts that relate to the questions I’ve asked at the bottom of the document.
Can you post your reply, both in this forum thread as well in the email reply I’ve requested?
Vielen Dank für die Hilfe…. hope thats right 🙂
P.S. Is there anything I should change regarding where and how I ask future questions?
Attachments:
You must be logged in to view attached files.7. Januar 2016 um 9:05 Uhr #1956 EagleEiAdministrator
EagleEiAdministratorHi OhioPilot,
first of all, sorry for the long delay, I seen your post only now, cause this section wasn´t trafficked till now!
So welcome to our project, nice to here from you!You asked for the Version EagleEi 3axis, the version without slipring motor.
I will helb you to understand the parts.
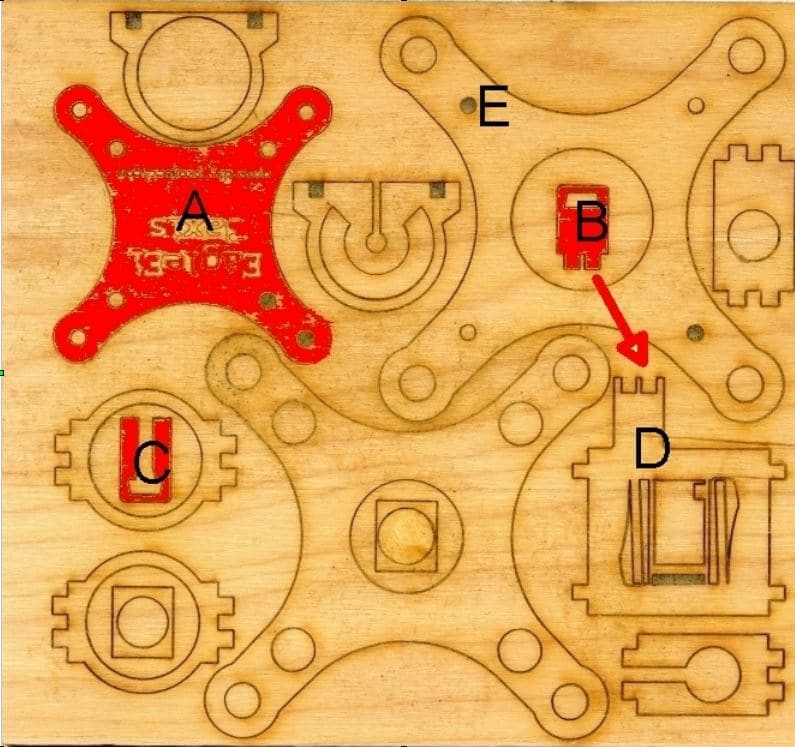
A= is just for closing the topside obove the STROM32 Board, it is not necessary, but nice to fix it to the copter or just protect the electronic.
B= is for using an USB Plug for AV-Out, it is 90° angel for holding the plug together with D
C= is the back part for B, it is also not necessary but it helps for stabalise the Plug.
see hereall clarification!?
Best regards
Benny11. Januar 2016 um 20:35 Uhr #1991TeilnehmerBenny,
Thank you for answering my questions… you answered them clearly and I fully understood all of your explanations.
I could still use your help in a couple of areas…
Could you also answer the following questions?
1). What’s the purpose of the intricate cut out pattern at the center of part D?
(This was the 4th question on my original request for help.)
2). To be sure we are talking the same design, when you say „the version without slipring motor.“ above you are referring to a „brushless“ motor correct?3) Have you worked with olliw at the following link:
http://www.olliw.eu/storm32bgc-wiki/Example_Setups#Mobius_ActionCam_Gimbals
to improve choices of the motors for each of the 3 axes?Any particular „current“ motor that you would recommend for each axis?th
Fred
P.S. I want to get more familiar with using this website so if its easier for you to not send me emails AND post here that’s ok. Posting alone here should be fine.
Can I make a choice somewhere on your website to get an automatic email notification when posts are made in this thread?
12. Januar 2016 um 1:04 Uhr #1992EagleEiAdministratorHi Fred,
I will try my very Best to awnser your qiestions again.1.the many cuts within Part D
it’s easy, You can use different IMU’s because it depend where You buy your Storm so I decided to find a way for some different size of IMUs with just cut the inner lines.2. Of cause, all EagleEi Gimbals use brushless Motors, The EagleEi 3 Axis is just with The Same Walkera Motors, The 360° Versions is with The RC-Timer Slipringmotor for The Yaw axis.
So your Frame is The Mobius 3axis!3. Yes, I gave all my experience with our Gimbals to Olli too, cause I like to share our knowledge, his The expert in storm32 and we try to so The Best wooden Gimbals! 🙂
All The Walkera Motors are The Same, just The lenght of The axis, You Can usw it all.Yes You Can get an automatic email after new Message, You just have to choice „Benachrichtigung“ see the attached Picture.
Best Regards
BennyAttachments:
You must be logged in to view attached files.12. Januar 2016 um 21:15 Uhr #2006TeilnehmerBenny,
I understand your answer regarding Part D.
I’m still deciding which motors I’ll be using so I’ll probably end up having to modify some of the parts on the parts on the wooden template you sent me.
I’ve also got a lot to learn about the components (motors, microprocessor, etc.) that Olli seems to recommend.
Do you have any paricular „gotcha’s (slang for particular things) that I should be careful about when building this gimbal (i.e. like unexpected problems etc. that you ran onto when you built the gimbal?)
Fred
9. April 2016 um 5:18 Uhr #2704ryanf55
TeilnehmerHello,
Thanks for setting up an english section. I am going to try to get a list of parts for the 3 axis mobius gimbal. Please let me know if that is everything
Controller and IMU: Storm32 Mini
http://www.hobbyking.com/hobbyking/store/__87745__Micro_Storm32_s_BGC_Brushless_Gimbal_Control_Board.htmlYaw motor: RCtimer 2608 70T with slipring
http://rctimer.com/product-1339.htmlPitch/Roll motors: Walker G-3D-Z-05
http://www.dx.com/p/walkera-g-3d-z-05-m-rolling-brushless-motor-wk-ws-22-001b-for-g-3d-gimble-black-brass-357381#.VwiCAPkrJzU
OR
Walkera G-3D-Z-06
http://www.dx.com/p/walkera-g-3d-z-06-m-tilt-brushless-motor-wk-ws-22-001b-for-g-3d-gimble-black-brass-357395#.VwiCsfkrJzU
Which motor is the correct one?And lastly the wood, glue, and some small gauge wires.
Please confirm those are the correct electronics and parts needed for the runcan/mobius 360 degree gimbal.
Thanks.9. April 2016 um 9:48 Uhr #2705EagleEiAdministratorHey ryanf55,
Yes we try to expand our doing for english, we think about to complete our frontpages and the descriptions also more technical information too.We looking for „English Guys“ who are interested to support us with our Open-DIY-project
So if you or somebody else have a little bit time to support us, WELCOME ON BOARD!!! 😉
I think you mean you want to build the EagleEi 360° Version (you wrote 3axis, thats the older Version without slipring)
For the 360° Versions you need 2x Walkera and 1x YAW- Motor and your links are right!
You can also check it on ebay or Banggood, they also have this parts!Also you need the Laserframe, USB-Plug, siliconwire and the small 4mm axis for the pitch.
This parts I can provid for you, if you like.In case for your controller, I´m not sure if and how your selected controller works, maybe that could be good alternativ, but I just have experience with OlliW 1.1 or 1.3 controllers,
for example this
at least you need damper tooHere you can find the embedded links for the parts too (first posting)
So if you like to have a Laserframe incl. the USB-Plug, siliconwire and the small 4mm axis, I can support you too.
Best Regards
Benny9. April 2016 um 22:59 Uhr #2706TeilnehmerBenny,
Thankyou for the reply.
Yes, I am trying to build the 360 degree version with slip-ring.
Cool, I will probably order parts in a few weeks once I get out of school for the summer. I would also be glad to help out with this project how I can too. Sadly, I do not know german, so I do not know if I would be much use.
I suspect this USB plug is what is needed:
http://www.hobbyking.com/hobbyking/store/__61655__Mobius_USB_to_AV_Out_FPV_cable_with_Charging.htmlI will cut the laserframe myself.
By „4mm pitch axis“, do you mean a 4mm rod/axle?
http://www.hobbyking.com/hobbyking/store/__49762__Assault_450_DFC_4mm_Feathering_Shaft_2pcs_.htmlFor the controller, I know that the micro storm32 has all the same features as a the full size version you linked. So, I will use that, and share the files for the top plates I design that have lower profile.
Thanks!
16. April 2016 um 10:48 Uhr #2712EagleEiAdministratorHey ryan,
yes, this USB Plug should work, but I prefer to use a Plug without wireing and casing, and I do solder it by my self with AWG30 siliconwires, just look for a plug like this
Your HK 4mm axis could work, you can also go in your next DIY superstore, ask for brass tubing 4mm outsite and with 3mm in
Cool, try to use the microstorm, but please inform us how it works, it could be really intersting to ust this small controller in future!! … if you need any help for your project, please let us know!
16. April 2016 um 10:51 Uhr #2713EagleEiAdministratorHey Guys,
now we finished our RUNCAM Gimbal and Yesterday I received the first small batch of the sets!So if you like you can have one of this first Sets!?
Also We found a DIY shop they will provid our doing and will sell our Sets too, they will start in few weeks with the onlineshop, until then I will try to meet the first needs.
We thought that it will help all DIYler to support with the special material for the Gimbal.
So the EagleEI RunCam sets are incl. all the needed parts expect the Motors, the Controller and the damping rubbers.– RUNCAM2 Laserframe
– Siliconwires 6x25cm for wiringthe Gimbal
– USB-Plug for Runcam AV-OUT
– Ferrit Pearl to minimize I2c errors (in case for no use of NT-IMU)
– axle bearing
– hollow axis
– Screws 2x M3x6 YAW-Motor mounting plate
– Screws 2x M3x8 YAW-Motor Gimbal
– Sandingpaper
– Latex with injection, for isolation the wires, ultra flexibel!
– dosage needle for perfect dosage the latexI can provide the Frame only for 20€ + shipping
or the Frame incl. all listed parts for 29€ + shipping (Germany 1,6€, Europe 4€, USA around 4 or 7€)So if you are interested please let me know and I can send you one of this first batch, while stocks last.
Here are some details about the first batch and the coming shop as soon as possible, (maybe you have to use translation)
If you have any questions please let me know!Best Regards
Benny29. April 2016 um 9:36 Uhr #2782davidpulvermacher
TeilnehmerHi Everybody
Having at last repaired my gimbal (bad pitch motor) and run the STorM NT32 setup, I have finally got the thing to work …sort of. I couldn’t get the last stage of the setup to finish. (setting the yaw angle)
The only thing that worries me is that the yaw motor (RcTimer) seems to be a bit ’notchy‘ when one turns the gimbal.
Has anyone else had a similar issue, or is this normal? Maybe my PIDs are out?
Best DP.29. April 2016 um 13:50 Uhr #2783TeilnehmerDavid,
I’ve just received what I believe is the same Yaw Motor from RcTimer that you have but I haven’t tested it yet. The P/N for the SlipRing motor I received is GBM2608-70T 8.5-SR.
I’d be glad to test the motor and see if the „notchy“ feeling is normal but I haven’t figured out how to make the correct wire connections to make the motor operable. I’m not familiar with slip ring motors and have yet to understand why there are so MANY wires coming off the slip ring itself. No wiring instructions came with the motor so I was planning to use Google to figure the wiring out.
If you could send me instructions on how to wire the motor (appropriate connections and how power is applied), I’d be glad to let you if the „notchiness“ is normal.
BTW: I’m also using the StorM32 NT board in my gimbal build….
Fred L.
P.S. If it helps speed things up, feel free to contact me directly via my email address FMLEAS@Hotmail.com
-
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.