Open DIY Projects › Stuhlkreis › EagleEi Gimbal 3axis › Aufbauanleitung für das EagleEi 3axis
- Dieses Thema hat 3 Antworten sowie 2 Teilnehmer und wurde zuletzt vor vor 11 Jahren von
 EagleEi aktualisiert.
EagleEi aktualisiert.
-
AutorBeiträge
-
14. März 2015 um 23:23 Uhr #354EagleEiAdministrator
Aufbauanleitung
» Holzframe zusammenbauen
folgendes wird benötigt:
– ein paar Tropfen Standard Leim
– ca. eine Stunde Bastelzeit
– Geduld und Konzentration
– bei Bedarf einen Schleifschwamm oder etwas Schleifpapier, für den optischen Feinschliff!
(das schleifen hat keine funktionale Bedeutung und es kann nach belieben auch darauf verzichtet werden)Eine bebilderte Aufbauanleitung ist im werden,
bis dahin ein grobes Video:
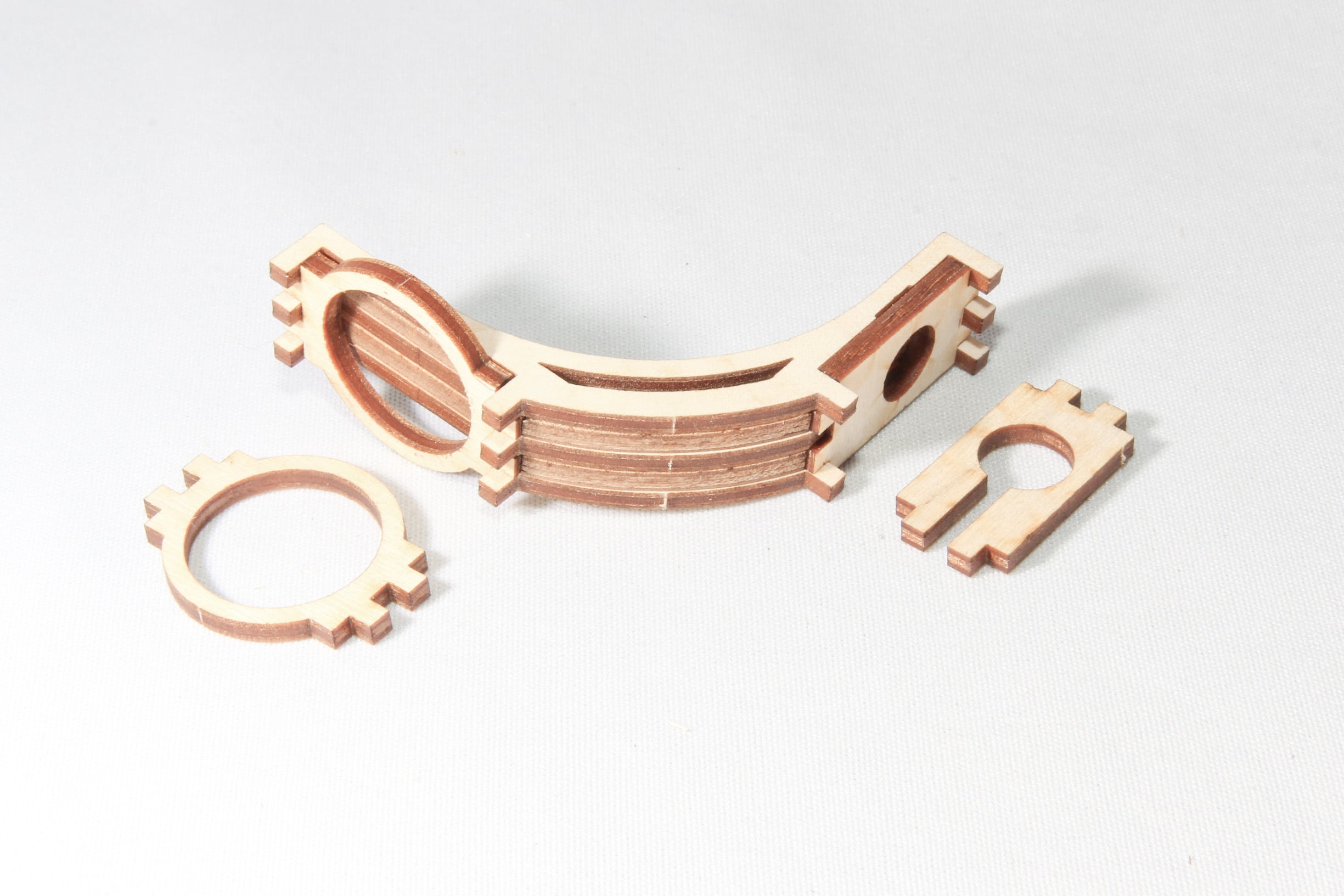
Zunächst den Gimbal-Haltearm zusammenbauen:
Der Haltearm besteht aus fünf Bögen Teilen und 2×2 Motorenfassungen

Wichtig ist es die Bögen in der richtigen Abfolge Zusammen zu kleben, es lohnt sich dies zunächst ohne Klebstoff zusammen zu fügen um sicher zu sein die richtige Reihenfolge zu haben! 😉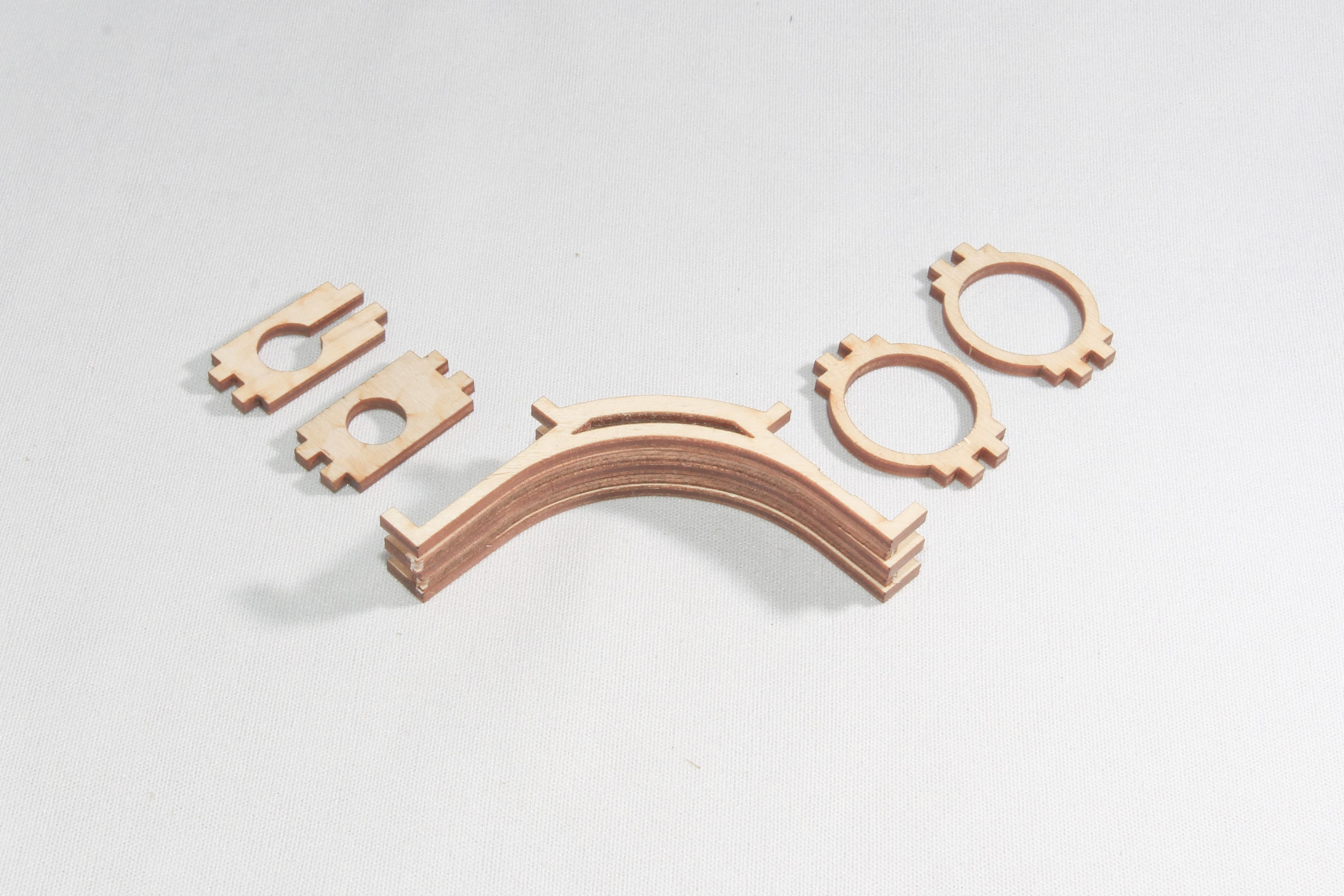

Nun folgt das U-Profil für die Rollachse:
Das U-Profil ist symetrisch aufgebaut, was die Fehlermöglichkeiten einschränkt.
(Lediglich die inneren zwei U-Layer haben auf einer Seite einen Kabelauslass für den Roll-Motor)



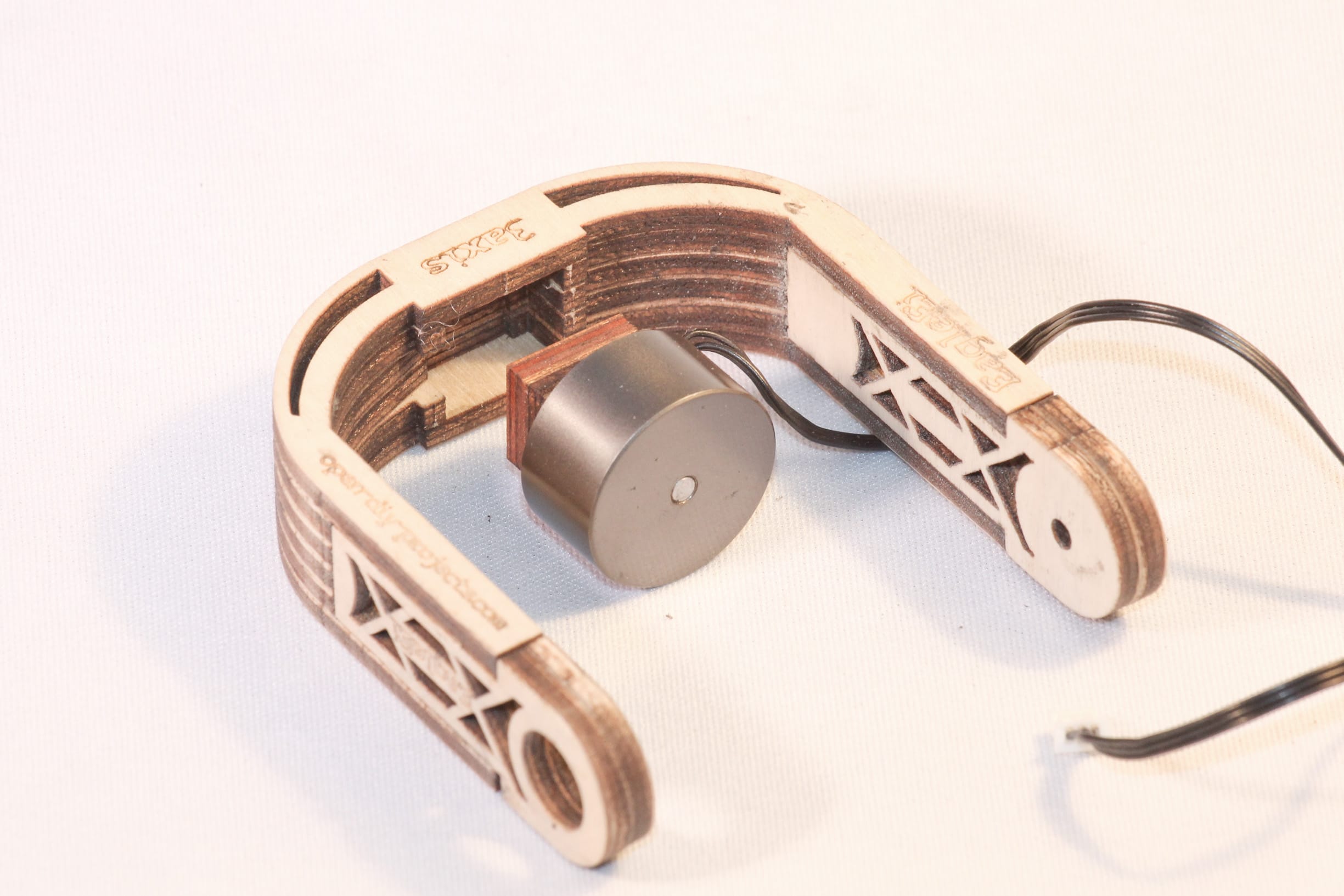
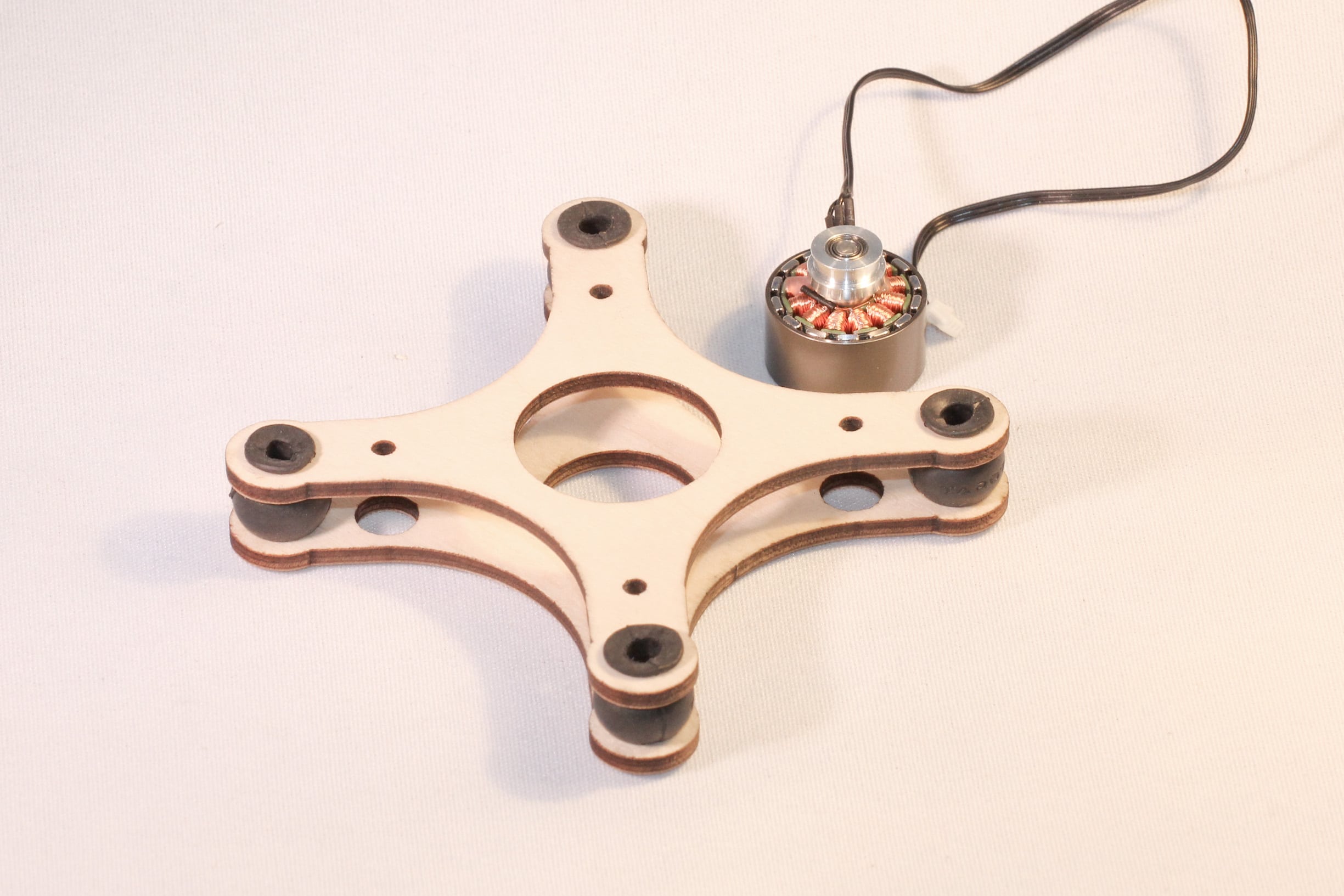
» Motoren vorbereiten
Die Motoren-Achse bündig nach dem Kugellager absägen oder mit einem Drehmel trennschleifen, am besten den Anker zuvor aus der Glocke ziehen, dieser hält nur durch die Magnetkraft.
Die Kabel auf die passende Länge kürzen und an der Adapterplatine auflöten.

» Motoren in die Frame verbauen
Mit Hilfe der Motoradapter, Zuschnitte in die Frame verkleben.

» IMU Neigungssensor in den Kamerahalter einbauen
In die Kamerahalterung können die original Neigesensoren von dem StoRM verbaut werden, alternativ auch die Standard-Sesoren „MPU 6050“. Hierbei müssen nur die Trennstege in der Kamerahalterung ausgetrennt werden.
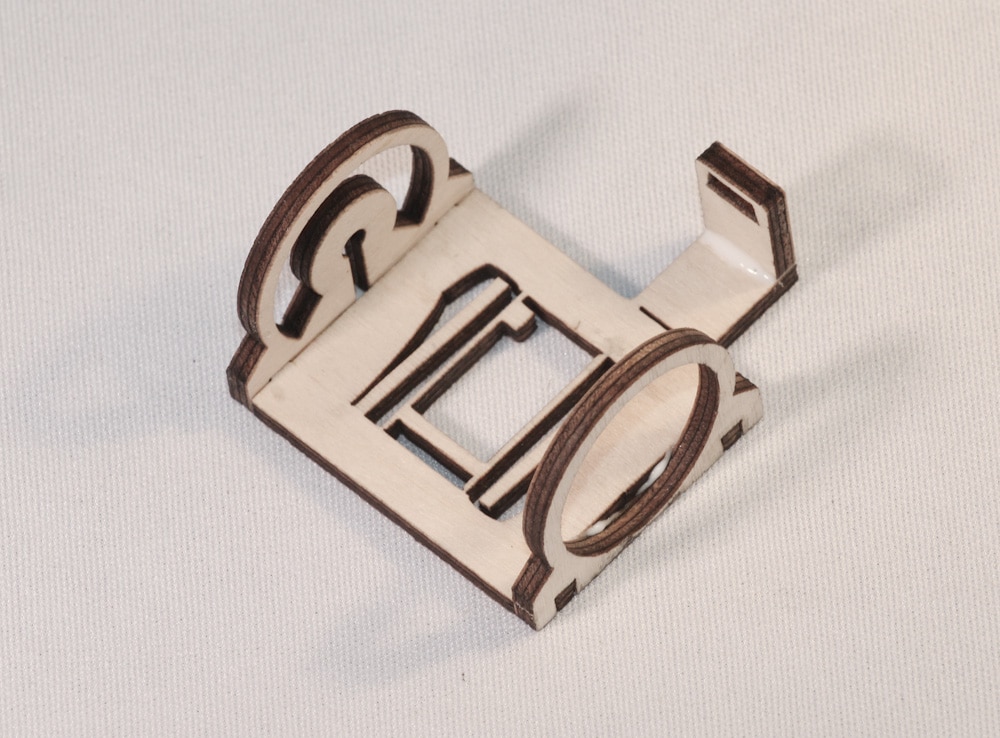
» Achsdurchführung
Das 4mm Messingrohr muss lediglich auf 10mm abgeschnitten werden und durch die Frame in die Kamerahalterung eingeschoben werden.

Zum Schluss die Dämpferplatte:

Einbau des YAW Motors:

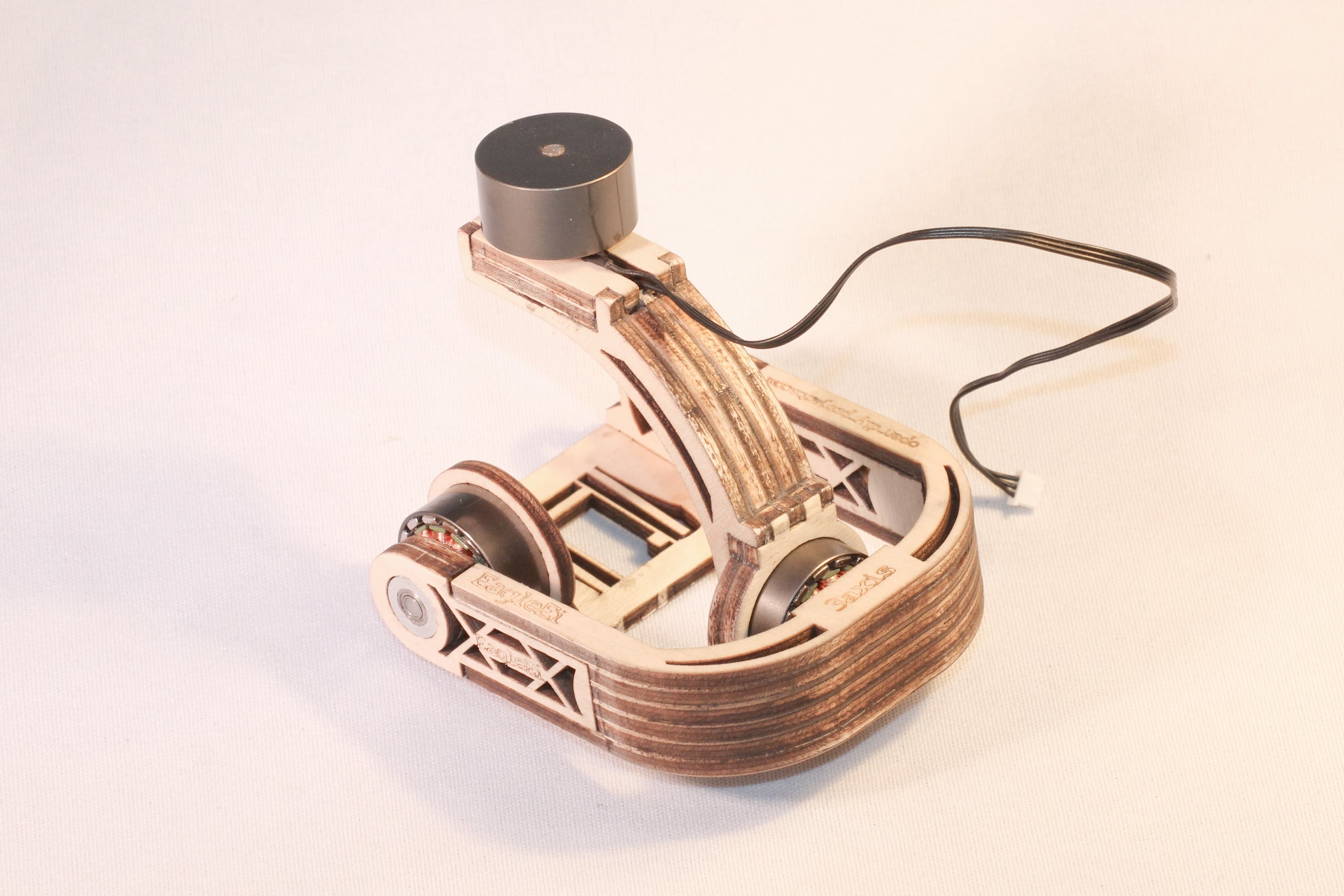
So sollte es nun auch bei euch aussehen:
 25. März 2015 um 22:00 Uhr #716EagleEiAdministrator
25. März 2015 um 22:00 Uhr #716EagleEiAdministratorHallo Klaus,
schön dass du uns an deinem Aufbau teilhaben lässt!
Dein Projekt mit dem Drachen Luft-Filme zu drehen, hört sich interessant an, halte uns bitte auf dem laufenden!Weiterhin viel Erfolg!
26. März 2015 um 8:54 Uhr #721 miataModerator
miataModeratorInteressant es an nem Drachen zu verwenden.
Ich hab meine Baufortschritte in dem extra Tread dafür hier beim 3-Achs Gimbal reingepackt. Sonst wird’s hier zu unübersichtlich, oder?
26. März 2015 um 18:53 Uhr #725EagleEiAdministratorja, lasst uns bitte die Bauabschnitte in den Bereich Bauberichte verschieben,
so können wir hier auf Fragen und Erweiterungen der Bauanleitung besser eingehen.
hier zu finden: https://open-diy-projects.com/topic/bauberichte/
@Flieger-Dt, ich habe deinen Beitrag soeben dorthin verschoben! -
AutorBeiträge
- Du musst angemeldet sein, um auf dieses Thema antworten zu können.